#!/usr/bin/env python
# coding: utf-8
# In[414]:
from IPython.core.display import HTML
import numpy as np
import math
# [x3d](https://pypi.org/project/x3d) is a [PyPI](https://pypi.org) distributed Python package maintained by the
# [Web3D Consortium](https://web3d.org). See also a local help file [x3d.x3d](x3d.x3d.html) explaining the import statement
#
# `from x3d import x3d` .
# In[415]:
from x3d import x3d
# [common_geometry](common_geometry.html) is a Python package, local to this Jupyter notebook folder, which defines convenience classes for generating X3D elements with the geometric definitition pertinent to this notebook. See [common_geometry.py](common_geometry.py) for Python source code; [common_geometry](common_geometry.html) for documentation autogenerated by the [pydoc](https://docs.python.org/3/library/pydoc.html) documentation system.
#
# In[416]:
import common_geometry
# In[417]:
alpha_degrees = 30.0 # the half angle of the cone
beta_degrees = 30.0 # the angle the intersecting plane makes with horizontal
a = 1.0 # distance of intersecting plane to cone vertex
f = 2.5 # total height of cone
if (alpha_degrees + beta_degrees >= 90.0):
raise AssertionError("choice of alpha , beta angles geometrically invalid")
# In[418]:
class InscribedSphere:
"""
data structure with named fields describing sphere inscribed (internally tangent)
to a cone with intersection with plane
"""
def __init__(self):
self.center = np.array((0.,0.,0.))
self.radius = 0.0
# focus is the point of tangency with the plane
self.focus = np.array((0.,0.,0.))
# contact_circle is the circular section where the sphere is in tangent contact with the cone
self.contact_circle_center = ((0.,0.,0.))
self.contact_circle_radius = 0.
def contact_circle_point(self, theta):
"""
returns a (3,) array of a point
on the circle, theta a cclockwise rotation (relative to y axis) from the x axis
"""
return self.contact_circle_center + self.contact_circle_radius * np.array((math.cos(theta),0.0, math.sin(theta)))
# In[419]:
# convert angles to radians
alpha = math.radians(alpha_degrees)
beta = math.radians(beta_degrees)
# In[420]:
# coordinates of points and direction vectors
pointC = np.array((0.,0.,0.))
axis = np.array((0.,-1.,0.)) # axis of cone, pointing to open end
pointB = pointC - a * axis
z = np.array((0.,0.,1.0)) # global z axis
normal = np.array((math.sin(beta), math.cos(beta),0.0))
ua = np.cross(z, normal) # a unit vector in inclined plane, largely in -x direction for beta > 0
# will be along semimajor axis of ellipse
ub = np.cross(normal, ua) # will be along semiminor axis
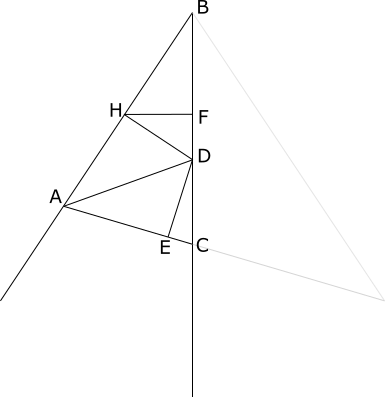
# ### Evaluation of geometry of the upper inscribed sphere
#
# ∡CBA = alpha
#
# ∡ACB = pi/2 - beta
#
# ∣AD is bisector of ∡BAC
#
# DE ⊥ AC
#
#
#
#
#
#
# 
# In[421]:
angCBA=alpha # alpha is half angle of cone
angBAC= math.pi/2 + beta - alpha # angles in triangle sum to pi
angDAC= angBAC/2 # AD segment is angle bisector of angle BAC
angACD= math.pi/2 - beta # beta is angle that segment AC makes with horizontal
angCDA= math.pi - angDAC - angACD # angles in triangle sum to pi
# now apply law of sines
disBC = a # definition of cone dimension a
disAC = math.sin(angCBA) * disBC / math.sin(angBAC) # law of sines
disCD = math.sin(angDAC) * disAC / math.sin(angCDA) # law of sines
disBD = disBC - disCD
disDH = disBD * math.sin(angCBA)
disDF = disDH * math.sin(angCBA)
disFH = disDH * math.cos(angCBA)
disDE = disCD * math.sin(angACD)
disCE = disCD * math.cos(angACD)
# In[ ]:
# In[422]:
upperSphere = InscribedSphere()
upperSphere.radius = disDE
upperSphere.center = pointC - disCD * axis
upperSphere.focus = pointC + disCE * ua
upperSphere.contact_circle_center = upperSphere.center - disDF * axis
upperSphere.contact_circle_radius = disFH
# In[ ]:
# #### Evaluation of geometry of the lower inscribed sphere
#
# ∡CBA = alpha
#
# ∡ACB = pi/2 - beta
#
# ∣AD is bisector of ∡BAC
#
# DE ⊥ AC
#
# In[423]:
disBC = a
angCBA=alpha
angACB= math.pi/2 + beta
angBAC= math.pi - angCBA - angACB
angCAD = (math.pi-angBAC)/2
angDCA = math.pi/2 - beta
angADC = math.pi - angCAD - angDCA
disAC = math.sin(angCBA) * disBC/math.sin(angBAC)
disCD = math.sin(angCAD) * disAC/math.sin(angADC)
disAD = math.sin(angDCA) * disAC/math.sin(angADC)
disDE = disAD * math.sin(angCAD)
disCE = disCD * math.cos(angDCA)
disBD = disBC + disCD
disDH = disBD * math.sin(angCBA)
disDF = disDH * math.sin(angCBA)
disFH = disDH * math.cos(angCBA)
# In[424]:
lowerSphere = InscribedSphere()
lowerSphere.radius = disDE
lowerSphere.center = pointC + disCD * axis
lowerSphere.focus = pointC - disCE * ua
lowerSphere.contact_circle_center = lowerSphere.center - disDF * axis
lowerSphere.contact_circle_radius = disFH
# In[425]:
sc = x3d.Scene()
sc.children.append( x3d.Background(skyColor = [(1,1,1)]) )
cone_shape = common_geometry.Cone(
vertex_height = a,
total_height = f,
half_angle = alpha,
appearance = x3d.Appearance(
material = x3d.Material( diffuseColor=(0.0,0.5,0.5),transparency=0.75)
)
)
plane_shape = common_geometry.TiltedPlane(
length = 2.5,
width = 2.5,
beta = beta,
appearance= x3d.Appearance( material = x3d.Material( emissiveColor=(0.8,0.6,0.6),
diffuseColor=(0.8,0.6,0.6),transparency=0.2)) )
upper_sphere = common_geometry.Sphere(
center = upperSphere.center,
radius = upperSphere.radius * 0.995 ,
appearance = x3d.Appearance( material = x3d.Material( diffuseColor=(1,1,0), transparency=0.0) )
)
upper_focus = common_geometry.Sphere(
center = upperSphere.focus,
radius = 0.02 ,
appearance = x3d.Appearance( material = x3d.Material( diffuseColor=(0,0,0), transparency=0.0) )
)
contact_circle_appearance = x3d.Appearance(
lineProperties = x3d.LineProperties( linewidthScaleFactor=1 ),
material= x3d.Material( emissiveColor = (0,0,1)) )
upper_contact_circle = common_geometry.Circle(
center = upperSphere.contact_circle_center,
radius = upperSphere.contact_circle_radius,
appearance = contact_circle_appearance
)
lower_sphere = common_geometry.Sphere(
center = lowerSphere.center,
radius = lowerSphere.radius * 0.995,
appearance = x3d.Appearance( material = x3d.Material( diffuseColor=(1,1,0.0)) )
)
lower_focus = common_geometry.Sphere(
center = lowerSphere.focus,
radius = 0.02 ,
appearance = x3d.Appearance( material = x3d.Material( diffuseColor=(0,0,0), transparency=0.0) )
)
lower_contact_circle = common_geometry.Circle(
center = lowerSphere.contact_circle_center,
radius = lowerSphere.contact_circle_radius,
appearance = contact_circle_appearance
)
figure = x3d.Transform(
rotation=(0, -1, 0 ,math.radians(20.0)),
children = [
cone_shape,
plane_shape,
upper_sphere,
upper_contact_circle,
upper_focus,
lower_sphere,
lower_contact_circle,
lower_focus
]
)
sc.children.append(figure)
# Explicitly construct the ellipse which is the intersection between the plane and the cone.
#
# Will start with a circle, then stretch it by different scales in x and z axis to be the appropriate
# ellipse, then rotate it around the z axis
# In[426]:
ellipse_center = 0.5 * (lowerSphere.focus + upperSphere.focus)
# c is 1/2 distance between foci
c = 0.5 * np.sqrt( np.square( lowerSphere.focus - upperSphere.focus).sum())
semimajor = 0.5 * np.sqrt( np.square( lowerSphere.contact_circle_center - upperSphere.contact_circle_center).sum())/ math.cos(alpha)
semiminor = np.sqrt( np.square(semimajor) - np.square(c))
print("semiminor axis: %.5f" % semiminor)
print("semimajor axis: %.5f" % semimajor)
def ellipse_point(theta):
"""
for theta an angle in radians, returns point on ellipse that makes angle theta measured from center
relative to major axis
"""
return ellipse_center + \
math.cos(theta) * semimajor * ua + \
math.sin(theta) * semiminor * ub
# In[427]:
ellipse_line_properties = x3d.LineProperties( applied=True, linewidthScaleFactor=3)
ellipse_material = x3d.Material(emissiveColor=(0,0,0))
appearance = x3d.Appearance( lineProperties = ellipse_line_properties, material=ellipse_material )
circular_shape = x3d.Transform(
rotation = (1.0, 0.0, 0.0, math.pi/2),
children=[
x3d.Shape(
geometry = x3d.Circle2D(radius=1.0),
appearance = appearance
)
]
)
ellipse_shape = x3d.Transform(
translation = tuple(ellipse_center),
children=[x3d.Transform(
rotation=(0 , 0, -1, beta),
children=[
x3d.Transform(
scale = (semimajor,1,semiminor),
children = [circular_shape]
)
]
) ]
)
figure.children.append(ellipse_shape)
# In[428]:
# create polyline: upper focus to ellipse to upper contact circle
theta = math.pi * 0.75
ep = ellipse_point(theta)
phi = math.atan2(ep[2], ep[0])
print("phi %.3f" % phi)
polyline_vertices = x3d.Coordinate(
[tuple(p) for p in \
[
upperSphere.focus,
ellipse_point(theta),
upperSphere.contact_circle_point(phi),
lowerSphere.focus,
ellipse_point(theta),
lowerSphere.contact_circle_point(phi),
]
]
)
polyline_vertices.DEF='foci_segments'
polyline_indices = [0,1,2,-1,3,4,5,-1]
polyline_colors = x3d.Color(color=[(0,0,1),(1,0,0)])
polyline = x3d.Shape(
geometry = x3d.IndexedLineSet(
colorPerVertex=False,
coord = polyline_vertices,
color = polyline_colors,
coordIndex = polyline_indices,
colorIndex = [0,1],
),
appearance = x3d.Appearance( lineProperties = ellipse_line_properties, material=ellipse_material )
)
figure.children.append(polyline)
# In[429]:
NumKeyFrame = 32
keys = np.linspace(0.0, 1.0, NumKeyFrame+1, endpoint=True)
key_values = list()
for frac in keys:
theta = 2. * math.pi * frac
ep = ellipse_point(theta)
phi = math.atan2(ep[2], ep[0])
value = [tuple(p) for p in \
[
upperSphere.focus,
ep,
upperSphere.contact_circle_point(phi),
lowerSphere.focus,
ep,
lowerSphere.contact_circle_point(phi),
]
]
key_values.extend( value )
print(key_values)
interpolator = x3d.CoordinateInterpolator(
key = list(keys),
keyValue = key_values,
DEF = 'foci_segments_interpolator'
)
sc.children.append(interpolator)
route1 = x3d.ROUTE(
fromNode = 'foci_segments_interpolator',
fromField = 'value_changed',
toNode = 'foci_segments',
toField = 'point'
)
sc.children.append(route1)
time_sensor=x3d.TimeSensor(
DEF = 'timer1',
cycleInterval = 5.0,
enabled=True,
loop = True,
)
sc.children.append(time_sensor)
sc.children.append(
x3d.ROUTE(
fromNode="timer1",
fromField='fraction_changed',
toNode = 'foci_segments_interpolator',
toField = 'set_fraction'
)
)
# In[430]:
get_ipython().run_cell_magic('html', '', ' \n \n\n')
# In[431]:
x3dnode = """\
%s
""" % sc.HTML5()
#print(x3dnode)
HTML(x3dnode)
# In[432]:
if (True):
print(sc.XML())
# In[ ]:
# In[ ]: