#!/usr/bin/env python
# coding: utf-8
# # 10. Implementing QR Factorization
# We used QR factorization in computing eigenvalues and to compute least squares regression. It is an important building block in numerical linear algebra.
#
# "One algorithm in numerical linear algebra is more important than all the others: QR factorization." --Trefethen, page 48
#
# Recall that for any matrix $A$, $A = QR$ where $Q$ is orthogonal and $R$ is upper-triangular.
# **Reminder**: The *QR algorithm*, which we looked at in the last lesson, uses the *QR decomposition*, but don't confuse the two.
# ### In Numpy ###
# In[5]:
import numpy as np
np.set_printoptions(suppress=True, precision=4)
# In[6]:
n = 5
A = np.random.rand(n,n)
npQ, npR = np.linalg.qr(A)
# Check that Q is orthogonal:
# In[7]:
np.allclose(np.eye(n), npQ @ npQ.T), np.allclose(np.eye(n), npQ.T @ npQ)
# Check that R is triangular
# In[8]:
npR
# ### Linear Algebra Review: Projections
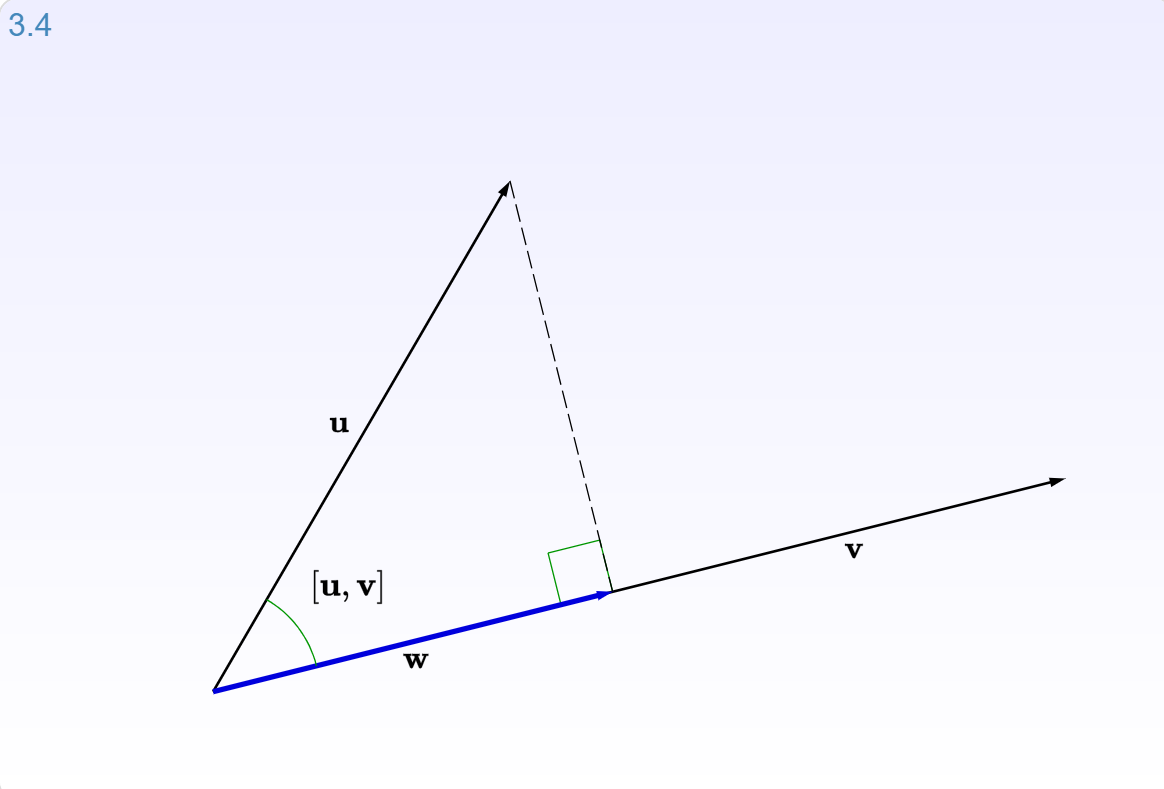
# When vector $\mathbf{b}$ is projected onto a line $\mathbf{a}$, its projection $\mathbf{p}$ is the part of $\mathbf{b}$ along that line $\mathbf{a}$.
#
# Let's look at interactive graphic (3.4) for [section 3.2.2: Projections](http://immersivemath.com/ila/ch03_dotproduct/ch03.html) of the [Immersive Linear Algebra online book](http://immersivemath.com/ila/index.html).
#
#  # (source: [Immersive Math](http://immersivemath.com/ila/ch03_dotproduct/ch03.html))
#
# And here is what it looks like to project a vector onto a plane:
#
#
# (source: [Immersive Math](http://immersivemath.com/ila/ch03_dotproduct/ch03.html))
#
# And here is what it looks like to project a vector onto a plane:
#
# 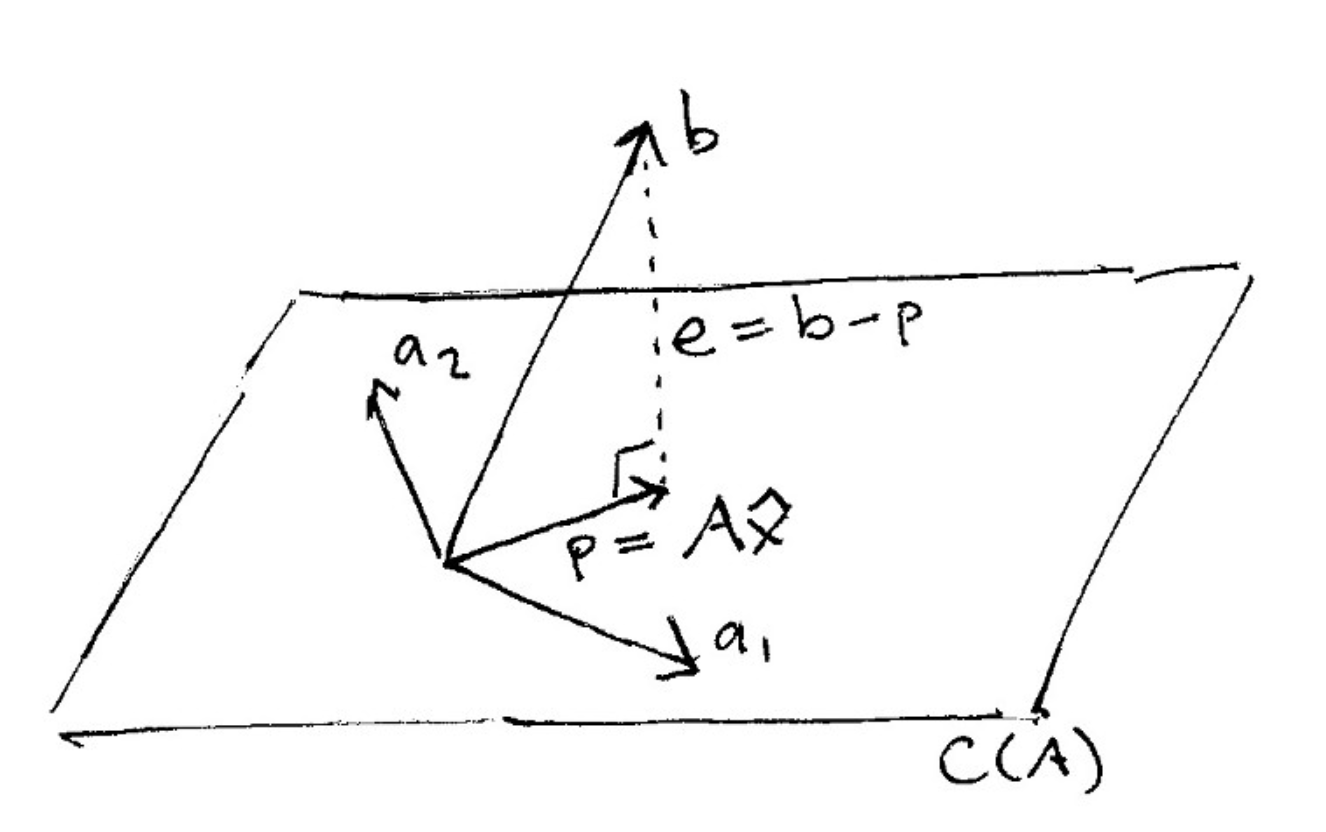 # (source: [The Linear Algebra View of Least-Squares Regression](https://medium.com/@andrew.chamberlain/the-linear-algebra-view-of-least-squares-regression-f67044b7f39b))
#
# When vector $\mathbf{b}$ is projected onto a line $\mathbf{a}$, its projection $\mathbf{p}$ is the part of $\mathbf{b}$ along that line $\mathbf{a}$. So $\mathbf{p}$ is some multiple of $\mathbf{a}$. Let $\mathbf{p} = \hat{x}\mathbf{a}$ where $\hat{x}$ is a scalar.
# #### Orthogonality
# **The key to projection is orthogonality:** The line *from* $\mathbf{b}$ to $\mathbf{p}$ (which can be written $\mathbf{b} - \hat{x}\mathbf{a}$) is perpendicular to $\mathbf{a}$.
#
# This means that $$ \mathbf{a} \cdot (\mathbf{b} - \hat{x}\mathbf{a}) = 0 $$
#
# and so $$\hat{x} = \frac{\mathbf{a} \cdot \mathbf{b}}{\mathbf{a} \cdot \mathbf{a}} $$
# ## Gram-Schmidt ##
# ### Classical Gram-Schmidt (unstable) ###
# For each $j$, calculate a single projection $$v_j = P_ja_j$$ where $P_j$ projects onto the space orthogonal to the span of $q_1,\ldots,q_{j-1}$.
# In[10]:
def cgs(A):
m, n = A.shape
Q = np.zeros([m,n], dtype=np.float64)
R = np.zeros([n,n], dtype=np.float64)
for j in range(n):
v = A[:,j]
for i in range(j):
R[i,j] = np.dot(Q[:,i], A[:,j])
v = v - (R[i,j] * Q[:,i])
R[j,j] = np.linalg.norm(v)
Q[:, j] = v / R[j,j]
return Q, R
# In[190]:
Q, R = cgs(A)
# In[191]:
np.allclose(A, Q @ R)
# Check if Q is unitary:
# In[109]:
np.allclose(np.eye(len(Q)), Q.dot(Q.T))
# In[115]:
np.allclose(npQ, -Q)
# In[192]:
R
# Gram-Schmidt should remind you a bit of the Arnoldi Iteration (used to transform a matrix to Hessenberg form) since it is also a structured orthogonalization.
# ### Modified Gram-Schmidt ###
# Classical (unstable) Gram-Schmidt: for each $j$, calculate a single projection $$v_j = P_ja_j$$ where $P_j$ projects onto the space orthogonal to the span of $q_1,\ldots,q_{j-1}$.
#
# Modified Gram-Schmidt: for each $j$, calculate $j-1$ projections $$P_j = P_{\perp q_{j-1}\cdots\perp q_{2}\perp q_{1}}$$
# In[30]:
import numpy as np
n = 3
A = np.random.rand(n,n).astype(np.float64)
# In[10]:
def cgs(A):
m, n = A.shape
Q = np.zeros([m,n], dtype=np.float64)
R = np.zeros([n,n], dtype=np.float64)
for j in range(n):
v = A[:,j]
for i in range(j):
R[i,j] = np.dot(Q[:,i], A[:,j])
v = v - (R[i,j] * Q[:,i])
R[j,j] = np.linalg.norm(v)
Q[:, j] = v / R[j,j]
return Q, R
# In[33]:
def mgs(A):
V = A.copy()
m, n = A.shape
Q = np.zeros([m,n], dtype=np.float64)
R = np.zeros([n,n], dtype=np.float64)
for i in range(n):
R[i,i] = np.linalg.norm(V[:,i])
Q[:,i] = V[:,i] / R[i,i]
for j in range(i, n):
R[i,j] = np.dot(Q[:,i],V[:,j])
V[:,j] = V[:,j] - R[i,j]*Q[:,i]
return Q, R
# In[34]:
Q, R = mgs(A)
# In[35]:
np.allclose(np.eye(len(Q)), Q.dot(Q.T.conj()))
# In[36]:
np.allclose(A, np.matmul(Q,R))
# ## Householder
# ### Intro
# \begin{array}{ l | l | c }
# \hline
# Gram-Schmidt & Triangular\, Orthogonalization & A R_1 R_2 \cdots R_n = Q \\
# Householder & Orthogonal\, Triangularization & Q_n \cdots Q_2 Q_1 A = R \\
# \hline
# \end{array}
# Householder reflections lead to a more nearly orthogonal matrix Q with rounding errors
#
# Gram-Schmidt can be stopped part-way, leaving a reduced QR of 1st n columns of A
# ### Initialization
# In[113]:
import numpy as np
n = 4
A = np.random.rand(n,n).astype(np.float64)
Q = np.zeros([n,n], dtype=np.float64)
R = np.zeros([n,n], dtype=np.float64)
# In[114]:
A
# In[115]:
from scipy.linalg import block_diag
# In[116]:
np.set_printoptions(5)
# ### Algorithm
# I added more computations and more info than needed, since it's illustrative of how the algorithm works. This version returns the *Householder Reflectors* as well.
# In[117]:
def householder_lots(A):
m, n = A.shape
R = np.copy(A)
V = []
Fs = []
for k in range(n):
v = np.copy(R[k:,k])
v = np.reshape(v, (n-k, 1))
v[0] += np.sign(v[0]) * np.linalg.norm(v)
v /= np.linalg.norm(v)
R[k:,k:] = R[k:,k:] - 2*np.matmul(v, np.matmul(v.T, R[k:,k:]))
V.append(v)
F = np.eye(n-k) - 2 * np.matmul(v, v.T)/np.matmul(v.T, v)
Fs.append(F)
return R, V, Fs
# Check that R is upper triangular:
# In[121]:
R
# As a check, we will calculate $Q^T$ and $R$ using the block matrices $F$. The matrices $F$ are *the householder reflectors*.
#
# Note that this is not a computationally efficient way of working with $Q$. In most cases, you do not actually need $Q$. For instance, if you are using QR to solve least squares, you just need $Q^*b$.
#
# - See page 74 of Trefethen for techniques to implicitly calculate the product $Q^*b$ or $Qx$.
# - See [these lecture notes](http://www.cs.cornell.edu/~bindel/class/cs6210-f09/lec18.pdf) for a different implementation of Householder that calculates Q simultaneously as part of R.
# In[175]:
QT = np.matmul(block_diag(np.eye(3), F[3]),
np.matmul(block_diag(np.eye(2), F[2]),
np.matmul(block_diag(np.eye(1), F[1]), F[0])))
# In[178]:
F[1]
# In[177]:
block_diag(np.eye(1), F[1])
# In[193]:
block_diag(np.eye(2), F[2])
# In[194]:
block_diag(np.eye(3), F[3])
# In[176]:
np.matmul(block_diag(np.eye(1), F[1]), F[0])
# In[123]:
QT
# In[124]:
R2 = np.matmul(block_diag(np.eye(3), F[3]),
np.matmul(block_diag(np.eye(2), F[2]),
np.matmul(block_diag(np.eye(1), F[1]),
np.matmul(F[0], A))))
# In[125]:
np.allclose(A, np.matmul(np.transpose(QT), R2))
# In[126]:
np.allclose(R, R2)
# Here's a concise version of Householder (although I do create a new R, instead of overwriting A and computing it in place).
# In[179]:
def householder(A):
m, n = A.shape
R = np.copy(A)
Q = np.eye(m)
V = []
for k in range(n):
v = np.copy(R[k:,k])
v = np.reshape(v, (n-k, 1))
v[0] += np.sign(v[0]) * np.linalg.norm(v)
v /= np.linalg.norm(v)
R[k:,k:] = R[k:,k:] - 2 * v @ v.T @ R[k:,k:]
V.append(v)
return R, V
# In[157]:
RH, VH = householder(A)
# Check that R is diagonal:
# In[129]:
RH
# In[130]:
VH
# In[131]:
np.allclose(R, RH)
# In[132]:
def implicit_Qx(V,x):
n = len(x)
for k in range(n-1,-1,-1):
x[k:n] -= 2*np.matmul(v[-k], np.matmul(v[-k], x[k:n]))
# In[133]:
A
# Both classical and modified Gram-Schmidt require $2mn^2$ flops.
# ### Gotchas
# Some things to be careful about:
# - when you've copied values vs. when you have two variables pointing to the same memory location
# - the difference between a vector of length n and a 1 x n matrix (np.matmul deals with them differently)
# ## Analogy
# | | $A = QR$ | $A = QHQ^*$ |
# |------------------------------|--------------|-------------|
# | orthogonal structuring | Householder | Householder |
# | structured orthogonalization | Gram-Schmidt | Arnoldi |
#
# **Gram-Schmidt and Arnoldi**: succession of triangular operations, can be stopped part way and first $n$ columns are correct
#
# **Householder**: succession of orthogoal operations. Leads to more nearly orthogonal A in presence of rounding errors.
#
# Note that to compute a Hessenberg reduction $A = QHQ^*$, Householder reflectors are applied to two sides of A, rather than just one.
# # Examples
# The following examples are taken from Lecture 9 of Trefethen and Bau, although translated from MATLAB into Python
# ### Ex: Classical vs Modified Gram-Schmidt ###
# This example is experiment 2 from section 9 of Trefethen. We want to construct a square matrix A with random singular vectors and widely varying singular values spaced by factors of 2 between $2^{-1}$ and $2^{-(n+1)}$
# In[68]:
import matplotlib.pyplot as plt
from matplotlib import rcParams
get_ipython().run_line_magic('matplotlib', 'inline')
# In[183]:
n = 100
U, X = np.linalg.qr(np.random.randn(n,n)) # set U to a random orthogonal matrix
V, X = np.linalg.qr(np.random.randn(n,n)) # set V to a random orthogonal matrix
S = np.diag(np.power(2,np.arange(-1,-(n+1),-1), dtype=float)) # Set S to a diagonal matrix w/ exp
# values between 2^-1 and 2^-(n+1)
# In[184]:
A = np.matmul(U,np.matmul(S,V))
# In[188]:
QC, RC = cgs(A)
QM, RM = mgs(A)
# In[189]:
plt.figure(figsize=(10,10))
plt.semilogy(np.diag(S), 'r.', basey=2, label="True Singular Values")
plt.semilogy(np.diag(RM), 'go', basey=2, label="Modified Gram-Shmidt")
plt.semilogy(np.diag(RC), 'bx', basey=2, label="Classic Gram-Shmidt")
plt.legend()
rcParams.update({'font.size': 18})
# In[94]:
type(A[0,0]), type(RC[0,0]), type(S[0,0])
# In[92]:
eps = np.finfo(np.float64).eps; eps
# In[93]:
np.log2(eps), np.log2(np.sqrt(eps))
# ### Ex: Numerical loss of orthogonality
# This example is experiment 3 from section 9 of Trefethen.
# In[197]:
A = np.array([[0.70000, 0.70711], [0.70001, 0.70711]])
# In[198]:
A
# Gram-Schmidt:
# In[96]:
Q1, R1 = mgs(A)
# Householder:
# In[105]:
R2, V, F = householder_lots(A)
Q2T = np.matmul(block_diag(np.eye(1), F[1]), F[0])
# Numpy's Householder:
# In[106]:
Q3, R3 = np.linalg.qr(A)
# Check that all the QR factorizations work:
# In[107]:
np.matmul(Q1, R1)
# In[108]:
np.matmul(Q2T.T, R2)
# In[109]:
np.matmul(Q3, R3)
# Check how close Q is to being perfectly orthonormal:
# In[110]:
np.linalg.norm(np.matmul(Q1.T, Q1) - np.eye(2)) # Modified Gram-Schmidt
# In[111]:
np.linalg.norm(np.matmul(Q2T.T, Q2T) - np.eye(2)) # Our implementation of Householder
# In[112]:
np.linalg.norm(np.matmul(Q3.T, Q3) - np.eye(2)) # Numpy (which uses Householder)
# GS (Q1) is less stable than Householder (Q2T, Q3)
# # End
# (source: [The Linear Algebra View of Least-Squares Regression](https://medium.com/@andrew.chamberlain/the-linear-algebra-view-of-least-squares-regression-f67044b7f39b))
#
# When vector $\mathbf{b}$ is projected onto a line $\mathbf{a}$, its projection $\mathbf{p}$ is the part of $\mathbf{b}$ along that line $\mathbf{a}$. So $\mathbf{p}$ is some multiple of $\mathbf{a}$. Let $\mathbf{p} = \hat{x}\mathbf{a}$ where $\hat{x}$ is a scalar.
# #### Orthogonality
# **The key to projection is orthogonality:** The line *from* $\mathbf{b}$ to $\mathbf{p}$ (which can be written $\mathbf{b} - \hat{x}\mathbf{a}$) is perpendicular to $\mathbf{a}$.
#
# This means that $$ \mathbf{a} \cdot (\mathbf{b} - \hat{x}\mathbf{a}) = 0 $$
#
# and so $$\hat{x} = \frac{\mathbf{a} \cdot \mathbf{b}}{\mathbf{a} \cdot \mathbf{a}} $$
# ## Gram-Schmidt ##
# ### Classical Gram-Schmidt (unstable) ###
# For each $j$, calculate a single projection $$v_j = P_ja_j$$ where $P_j$ projects onto the space orthogonal to the span of $q_1,\ldots,q_{j-1}$.
# In[10]:
def cgs(A):
m, n = A.shape
Q = np.zeros([m,n], dtype=np.float64)
R = np.zeros([n,n], dtype=np.float64)
for j in range(n):
v = A[:,j]
for i in range(j):
R[i,j] = np.dot(Q[:,i], A[:,j])
v = v - (R[i,j] * Q[:,i])
R[j,j] = np.linalg.norm(v)
Q[:, j] = v / R[j,j]
return Q, R
# In[190]:
Q, R = cgs(A)
# In[191]:
np.allclose(A, Q @ R)
# Check if Q is unitary:
# In[109]:
np.allclose(np.eye(len(Q)), Q.dot(Q.T))
# In[115]:
np.allclose(npQ, -Q)
# In[192]:
R
# Gram-Schmidt should remind you a bit of the Arnoldi Iteration (used to transform a matrix to Hessenberg form) since it is also a structured orthogonalization.
# ### Modified Gram-Schmidt ###
# Classical (unstable) Gram-Schmidt: for each $j$, calculate a single projection $$v_j = P_ja_j$$ where $P_j$ projects onto the space orthogonal to the span of $q_1,\ldots,q_{j-1}$.
#
# Modified Gram-Schmidt: for each $j$, calculate $j-1$ projections $$P_j = P_{\perp q_{j-1}\cdots\perp q_{2}\perp q_{1}}$$
# In[30]:
import numpy as np
n = 3
A = np.random.rand(n,n).astype(np.float64)
# In[10]:
def cgs(A):
m, n = A.shape
Q = np.zeros([m,n], dtype=np.float64)
R = np.zeros([n,n], dtype=np.float64)
for j in range(n):
v = A[:,j]
for i in range(j):
R[i,j] = np.dot(Q[:,i], A[:,j])
v = v - (R[i,j] * Q[:,i])
R[j,j] = np.linalg.norm(v)
Q[:, j] = v / R[j,j]
return Q, R
# In[33]:
def mgs(A):
V = A.copy()
m, n = A.shape
Q = np.zeros([m,n], dtype=np.float64)
R = np.zeros([n,n], dtype=np.float64)
for i in range(n):
R[i,i] = np.linalg.norm(V[:,i])
Q[:,i] = V[:,i] / R[i,i]
for j in range(i, n):
R[i,j] = np.dot(Q[:,i],V[:,j])
V[:,j] = V[:,j] - R[i,j]*Q[:,i]
return Q, R
# In[34]:
Q, R = mgs(A)
# In[35]:
np.allclose(np.eye(len(Q)), Q.dot(Q.T.conj()))
# In[36]:
np.allclose(A, np.matmul(Q,R))
# ## Householder
# ### Intro
# \begin{array}{ l | l | c }
# \hline
# Gram-Schmidt & Triangular\, Orthogonalization & A R_1 R_2 \cdots R_n = Q \\
# Householder & Orthogonal\, Triangularization & Q_n \cdots Q_2 Q_1 A = R \\
# \hline
# \end{array}
# Householder reflections lead to a more nearly orthogonal matrix Q with rounding errors
#
# Gram-Schmidt can be stopped part-way, leaving a reduced QR of 1st n columns of A
# ### Initialization
# In[113]:
import numpy as np
n = 4
A = np.random.rand(n,n).astype(np.float64)
Q = np.zeros([n,n], dtype=np.float64)
R = np.zeros([n,n], dtype=np.float64)
# In[114]:
A
# In[115]:
from scipy.linalg import block_diag
# In[116]:
np.set_printoptions(5)
# ### Algorithm
# I added more computations and more info than needed, since it's illustrative of how the algorithm works. This version returns the *Householder Reflectors* as well.
# In[117]:
def householder_lots(A):
m, n = A.shape
R = np.copy(A)
V = []
Fs = []
for k in range(n):
v = np.copy(R[k:,k])
v = np.reshape(v, (n-k, 1))
v[0] += np.sign(v[0]) * np.linalg.norm(v)
v /= np.linalg.norm(v)
R[k:,k:] = R[k:,k:] - 2*np.matmul(v, np.matmul(v.T, R[k:,k:]))
V.append(v)
F = np.eye(n-k) - 2 * np.matmul(v, v.T)/np.matmul(v.T, v)
Fs.append(F)
return R, V, Fs
# Check that R is upper triangular:
# In[121]:
R
# As a check, we will calculate $Q^T$ and $R$ using the block matrices $F$. The matrices $F$ are *the householder reflectors*.
#
# Note that this is not a computationally efficient way of working with $Q$. In most cases, you do not actually need $Q$. For instance, if you are using QR to solve least squares, you just need $Q^*b$.
#
# - See page 74 of Trefethen for techniques to implicitly calculate the product $Q^*b$ or $Qx$.
# - See [these lecture notes](http://www.cs.cornell.edu/~bindel/class/cs6210-f09/lec18.pdf) for a different implementation of Householder that calculates Q simultaneously as part of R.
# In[175]:
QT = np.matmul(block_diag(np.eye(3), F[3]),
np.matmul(block_diag(np.eye(2), F[2]),
np.matmul(block_diag(np.eye(1), F[1]), F[0])))
# In[178]:
F[1]
# In[177]:
block_diag(np.eye(1), F[1])
# In[193]:
block_diag(np.eye(2), F[2])
# In[194]:
block_diag(np.eye(3), F[3])
# In[176]:
np.matmul(block_diag(np.eye(1), F[1]), F[0])
# In[123]:
QT
# In[124]:
R2 = np.matmul(block_diag(np.eye(3), F[3]),
np.matmul(block_diag(np.eye(2), F[2]),
np.matmul(block_diag(np.eye(1), F[1]),
np.matmul(F[0], A))))
# In[125]:
np.allclose(A, np.matmul(np.transpose(QT), R2))
# In[126]:
np.allclose(R, R2)
# Here's a concise version of Householder (although I do create a new R, instead of overwriting A and computing it in place).
# In[179]:
def householder(A):
m, n = A.shape
R = np.copy(A)
Q = np.eye(m)
V = []
for k in range(n):
v = np.copy(R[k:,k])
v = np.reshape(v, (n-k, 1))
v[0] += np.sign(v[0]) * np.linalg.norm(v)
v /= np.linalg.norm(v)
R[k:,k:] = R[k:,k:] - 2 * v @ v.T @ R[k:,k:]
V.append(v)
return R, V
# In[157]:
RH, VH = householder(A)
# Check that R is diagonal:
# In[129]:
RH
# In[130]:
VH
# In[131]:
np.allclose(R, RH)
# In[132]:
def implicit_Qx(V,x):
n = len(x)
for k in range(n-1,-1,-1):
x[k:n] -= 2*np.matmul(v[-k], np.matmul(v[-k], x[k:n]))
# In[133]:
A
# Both classical and modified Gram-Schmidt require $2mn^2$ flops.
# ### Gotchas
# Some things to be careful about:
# - when you've copied values vs. when you have two variables pointing to the same memory location
# - the difference between a vector of length n and a 1 x n matrix (np.matmul deals with them differently)
# ## Analogy
# | | $A = QR$ | $A = QHQ^*$ |
# |------------------------------|--------------|-------------|
# | orthogonal structuring | Householder | Householder |
# | structured orthogonalization | Gram-Schmidt | Arnoldi |
#
# **Gram-Schmidt and Arnoldi**: succession of triangular operations, can be stopped part way and first $n$ columns are correct
#
# **Householder**: succession of orthogoal operations. Leads to more nearly orthogonal A in presence of rounding errors.
#
# Note that to compute a Hessenberg reduction $A = QHQ^*$, Householder reflectors are applied to two sides of A, rather than just one.
# # Examples
# The following examples are taken from Lecture 9 of Trefethen and Bau, although translated from MATLAB into Python
# ### Ex: Classical vs Modified Gram-Schmidt ###
# This example is experiment 2 from section 9 of Trefethen. We want to construct a square matrix A with random singular vectors and widely varying singular values spaced by factors of 2 between $2^{-1}$ and $2^{-(n+1)}$
# In[68]:
import matplotlib.pyplot as plt
from matplotlib import rcParams
get_ipython().run_line_magic('matplotlib', 'inline')
# In[183]:
n = 100
U, X = np.linalg.qr(np.random.randn(n,n)) # set U to a random orthogonal matrix
V, X = np.linalg.qr(np.random.randn(n,n)) # set V to a random orthogonal matrix
S = np.diag(np.power(2,np.arange(-1,-(n+1),-1), dtype=float)) # Set S to a diagonal matrix w/ exp
# values between 2^-1 and 2^-(n+1)
# In[184]:
A = np.matmul(U,np.matmul(S,V))
# In[188]:
QC, RC = cgs(A)
QM, RM = mgs(A)
# In[189]:
plt.figure(figsize=(10,10))
plt.semilogy(np.diag(S), 'r.', basey=2, label="True Singular Values")
plt.semilogy(np.diag(RM), 'go', basey=2, label="Modified Gram-Shmidt")
plt.semilogy(np.diag(RC), 'bx', basey=2, label="Classic Gram-Shmidt")
plt.legend()
rcParams.update({'font.size': 18})
# In[94]:
type(A[0,0]), type(RC[0,0]), type(S[0,0])
# In[92]:
eps = np.finfo(np.float64).eps; eps
# In[93]:
np.log2(eps), np.log2(np.sqrt(eps))
# ### Ex: Numerical loss of orthogonality
# This example is experiment 3 from section 9 of Trefethen.
# In[197]:
A = np.array([[0.70000, 0.70711], [0.70001, 0.70711]])
# In[198]:
A
# Gram-Schmidt:
# In[96]:
Q1, R1 = mgs(A)
# Householder:
# In[105]:
R2, V, F = householder_lots(A)
Q2T = np.matmul(block_diag(np.eye(1), F[1]), F[0])
# Numpy's Householder:
# In[106]:
Q3, R3 = np.linalg.qr(A)
# Check that all the QR factorizations work:
# In[107]:
np.matmul(Q1, R1)
# In[108]:
np.matmul(Q2T.T, R2)
# In[109]:
np.matmul(Q3, R3)
# Check how close Q is to being perfectly orthonormal:
# In[110]:
np.linalg.norm(np.matmul(Q1.T, Q1) - np.eye(2)) # Modified Gram-Schmidt
# In[111]:
np.linalg.norm(np.matmul(Q2T.T, Q2T) - np.eye(2)) # Our implementation of Householder
# In[112]:
np.linalg.norm(np.matmul(Q3.T, Q3) - np.eye(2)) # Numpy (which uses Householder)
# GS (Q1) is less stable than Householder (Q2T, Q3)
# # End