#!/usr/bin/env python
# coding: utf-8
# # Admissible Heuristics
# An **admissible heuristic** is one that never overestimates the cost
# of the minimum cost path from a node to the goal node. So, a
# heuristic is specific to a particular state space, and also to a
# particular goal state in that state space. It must be **admissible**
# for all states in that search space.
#
# To help remember whether it is "never overestimates" or "never
# underestimates", just remember that an admissible heuristic is too
# optimistic. It will lead A\* to search paths that turn out to be more
# costly that the optimal path. It will not prevent A\* from expanding
# a node that is on the optimal path by producing a heuristic $h$ value
# that is too high.
#
# A stronger requirement on a heuristic is that it is **consistent**,
# sometimes called **monotonic**. A heuristic $h$ is consistent if its value is nondecreasing along a path. Mathematically, a heuristic $h$ is consistent if for
# every node $n$ of a parent node $p$,
#
# $$h(p) \le h(n) + \mathrm{stepcost}(p,n)$$
#
# Every consistent heuristic must be admissible. (How would you show
# this?) Sometimes showing a
# heuristic is consistent is a good way of proving it is admissible.
#
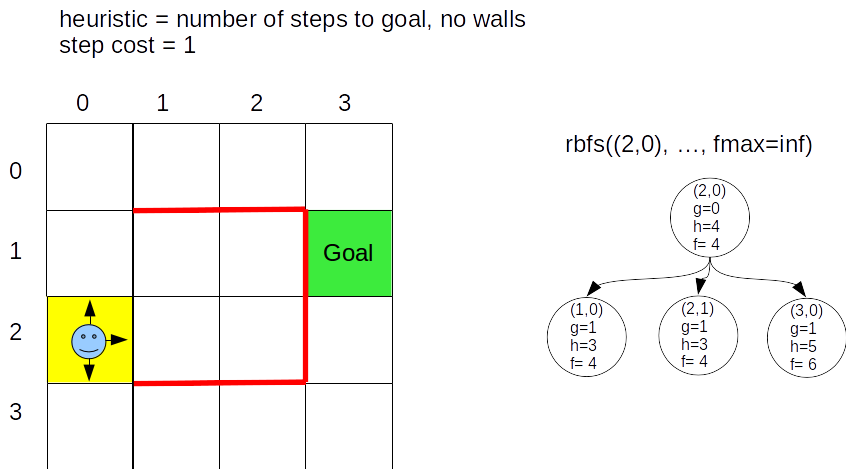
# # Example Robot Search Problem
#  # # Proof of A\* Optimality
# Section 3.5.2 describes one proof of A\* optimality that relies on $h$
# being consistent. It proceeds as follows.
#
# For a goal node $n$, $f(n)$ is the true cost of the path from the
# start node to this goal node; $f(n) = g(n) + h(n) = g(n) + 0$ because
# $h(n)=0$ for goal nodes.
#
# If A\* expands nodes in nondecreasing order of $f(n)$, then the first
# goal node selected for expansion must be an optimal solution, because
# for goal nodes $f(n)$ is the true cost of path to this goal node.
#
# We must show that A\* expands nodes in nondecreasing order.
#
# Suppose node $n$ is a child of node $p$. Then
#
#
# $$\begin{align*}
# f(n) &= g(n) + h(n)\\
# &= g(p) + \mathrm{stepcost}(p,n) + h(n) & \text{ because } g(n) = g(p) + \mathrm{stepcost}(p,n)\\
# &\ge g(p) + h(p) & \text{ assuming } h \text{ is consistent,
# meaning }\\
# & & ~~~~~~~~~ h(p) \le h(n) + \mathrm{stepcost}(p,n) \\
# &= f(p)
# \end{align*}$$
#
# so
#
# $$\begin{align*}
# f(n) &\ge f(p)
# \end{align*}$$
#
# In other words, if $h(n)$ is consistent for all $n$, then the values of $f(n)$ along
# any path are nondecreasing.
#
# Now we must show that whenever A\* selects a node $n$ for expansion, an
# optimal path to that node has been found. If this were not true, another
# node $m$ must exist on the unexpanded (frontier) list through which a
# better path exists from start node to node $n$. But, this node would
# have a lower $f$ value and would be selected next instead of node
# $n$, a contradiction.
#
# Here is another way of proving that the optimal path to a goal is
# found. It only assumes the heuristic is admissible.
#
# Consider this situation.
#
#
# # Proof of A\* Optimality
# Section 3.5.2 describes one proof of A\* optimality that relies on $h$
# being consistent. It proceeds as follows.
#
# For a goal node $n$, $f(n)$ is the true cost of the path from the
# start node to this goal node; $f(n) = g(n) + h(n) = g(n) + 0$ because
# $h(n)=0$ for goal nodes.
#
# If A\* expands nodes in nondecreasing order of $f(n)$, then the first
# goal node selected for expansion must be an optimal solution, because
# for goal nodes $f(n)$ is the true cost of path to this goal node.
#
# We must show that A\* expands nodes in nondecreasing order.
#
# Suppose node $n$ is a child of node $p$. Then
#
#
# $$\begin{align*}
# f(n) &= g(n) + h(n)\\
# &= g(p) + \mathrm{stepcost}(p,n) + h(n) & \text{ because } g(n) = g(p) + \mathrm{stepcost}(p,n)\\
# &\ge g(p) + h(p) & \text{ assuming } h \text{ is consistent,
# meaning }\\
# & & ~~~~~~~~~ h(p) \le h(n) + \mathrm{stepcost}(p,n) \\
# &= f(p)
# \end{align*}$$
#
# so
#
# $$\begin{align*}
# f(n) &\ge f(p)
# \end{align*}$$
#
# In other words, if $h(n)$ is consistent for all $n$, then the values of $f(n)$ along
# any path are nondecreasing.
#
# Now we must show that whenever A\* selects a node $n$ for expansion, an
# optimal path to that node has been found. If this were not true, another
# node $m$ must exist on the unexpanded (frontier) list through which a
# better path exists from start node to node $n$. But, this node would
# have a lower $f$ value and would be selected next instead of node
# $n$, a contradiction.
#
# Here is another way of proving that the optimal path to a goal is
# found. It only assumes the heuristic is admissible.
#
# Consider this situation.
#
#  #
# $a$ and $b$ both satisfy the goal function, but $b$ is optimal, $a$
# is not.
#
# Assume $a$ is selected before $n$. This will lead to a contradiction,
# showing this assumption is wrong.
#
# Let $f^*$ be the cost of the optimal path to $b$. Let $n$ be a parent
# node to $b$ on the optimal path to $b$.
#
# If $h$ is admissible,
#
# $$\begin{align*}
# h(n) & \le \text{true optimal cost from }n\text{ to a goal.}\\
# g(n) + h(n) &\le g(n) + \text{true optimal cost from }n\text{ to a goal.}\\
# f(n) &\le f^*
# \end{align*}$$
#
# Since we are assuming $a$ is selected before $n$,
#
# $$\begin{align*}
# f(a) & \le f^*\\
# g(a) + h(a) & \le f*\\
# g(a) &\le f^* &\text{because }a\text{ is a goal node so }h(a)=0
# \end{align*}$$
#
# This means we have just proved that the true cost to $a$, $g(a)$, is
# less than the optimal cost to a goal node, a contradiction. So, our
# assumption that a suboptimal goal is chosen was wrong.
# # Optimally Efficient
# No other algorithm that extends search paths from the start node and
# uses the same heuristic information will expand fewer nodes that A\*.
#
# However, maintaining the list of unexpanded frontier nodes can quickly
# consume all storage. This is why we focus on the
# recursive-best-first-search version of A\*. Its iterative-deepening
# strategy of throwing away and regenerating nodes reduces the maximum
# number of nodes stored at any point of the algorithm. Its space
# complexity is linear in the depth of the deepest optimal solution. Its
# time complexity is hard to characterize as it depends on the accuracy
# of the heuristic function.
#
# This form of A\* throws away too many nodes to be as efficient in time
# as it can be. Alternatives include the simplified memory-bounded A\*,
# SMA\*, algorithm. SMA\* proceeds like a graph-based search maintaining
# the unexplored frontier list. When it runs out of memory, it deletes
# the node with the worst $f$ value and backs that value up to the
# deleted node's parent.
# # Heuristic Functions
# Okay, so we must have admissible heuristic functions, ones that never
# overestimate the true remaining cost to a goal. Are some admissible
# heuristics better than others?
#
# We want ones that mislead A\* least often. A heuristic will mislead if
# its estimate of remaining cost to goal is much, much lower than the
# true cost. So, we want heuristics that are as close as possible to the true
# remaining cost for all nodes without going over the true cost, and
# thus overestimate and are not admissible. A heuristic $h_1$ is
# better than $h_2$ if $h_1(n) \ge h_2(n)$ for all $n$. $h_1$ is said
# to "dominate" $h_2$.
# # A* Practice Exercise
# Complete the following A\* search tree before next class. Answer will be discussed in class.
# [A\* star exercise](http://www.cs.colostate.edu/~anderson/cs440/notebooks/astarexercise.pdf)
#
# $a$ and $b$ both satisfy the goal function, but $b$ is optimal, $a$
# is not.
#
# Assume $a$ is selected before $n$. This will lead to a contradiction,
# showing this assumption is wrong.
#
# Let $f^*$ be the cost of the optimal path to $b$. Let $n$ be a parent
# node to $b$ on the optimal path to $b$.
#
# If $h$ is admissible,
#
# $$\begin{align*}
# h(n) & \le \text{true optimal cost from }n\text{ to a goal.}\\
# g(n) + h(n) &\le g(n) + \text{true optimal cost from }n\text{ to a goal.}\\
# f(n) &\le f^*
# \end{align*}$$
#
# Since we are assuming $a$ is selected before $n$,
#
# $$\begin{align*}
# f(a) & \le f^*\\
# g(a) + h(a) & \le f*\\
# g(a) &\le f^* &\text{because }a\text{ is a goal node so }h(a)=0
# \end{align*}$$
#
# This means we have just proved that the true cost to $a$, $g(a)$, is
# less than the optimal cost to a goal node, a contradiction. So, our
# assumption that a suboptimal goal is chosen was wrong.
# # Optimally Efficient
# No other algorithm that extends search paths from the start node and
# uses the same heuristic information will expand fewer nodes that A\*.
#
# However, maintaining the list of unexpanded frontier nodes can quickly
# consume all storage. This is why we focus on the
# recursive-best-first-search version of A\*. Its iterative-deepening
# strategy of throwing away and regenerating nodes reduces the maximum
# number of nodes stored at any point of the algorithm. Its space
# complexity is linear in the depth of the deepest optimal solution. Its
# time complexity is hard to characterize as it depends on the accuracy
# of the heuristic function.
#
# This form of A\* throws away too many nodes to be as efficient in time
# as it can be. Alternatives include the simplified memory-bounded A\*,
# SMA\*, algorithm. SMA\* proceeds like a graph-based search maintaining
# the unexplored frontier list. When it runs out of memory, it deletes
# the node with the worst $f$ value and backs that value up to the
# deleted node's parent.
# # Heuristic Functions
# Okay, so we must have admissible heuristic functions, ones that never
# overestimate the true remaining cost to a goal. Are some admissible
# heuristics better than others?
#
# We want ones that mislead A\* least often. A heuristic will mislead if
# its estimate of remaining cost to goal is much, much lower than the
# true cost. So, we want heuristics that are as close as possible to the true
# remaining cost for all nodes without going over the true cost, and
# thus overestimate and are not admissible. A heuristic $h_1$ is
# better than $h_2$ if $h_1(n) \ge h_2(n)$ for all $n$. $h_1$ is said
# to "dominate" $h_2$.
# # A* Practice Exercise
# Complete the following A\* search tree before next class. Answer will be discussed in class.
# [A\* star exercise](http://www.cs.colostate.edu/~anderson/cs440/notebooks/astarexercise.pdf)