XYZLoader TLS Demo¶
Notebook: Sina Zumstein & Hannah Weiser, 2023
This demo shows how to load a point cloud as scene part, which is then converted to a voxel model by HELIOS++, and scan it with terrestrial laser scanning (TLS). We will use the command-line access of HELIOS++ to run the simulation, and use Python just for displaying the input XMLs and the resulting point clouds.
from IPython.display import Code
from pyhelios.util.xmldisplayer import display_xml, find_playback_dir
import os
os.chdir("..")
Survey¶
Let us look at the XML files in the simulation. First, we investigate the survey XML file, tls_sphere_xyzloader.xml in data\surveys\voxels:
Code(display_xml('data/surveys/voxels/tls_sphere_xyzloader.xml'), language='XML')
<document>
<survey name="tls_sphere_xyzloader" scene="data/scenes/voxels/sphere_xyzloader.xml#sphere_xyzloader_demo" platform="data/platforms.xml#tripod" scanner="data/scanners_tls.xml#riegl_vz400">
<leg>
<platformSettings x="40" y="-10" z="0" onGround="true" />
<scannerSettings active="true" pulseFreq_hz="100000" verticalAngleMin_deg="-40.0" verticalAngleMax_deg="60.0" scanFreq_hz="120" headRotatePerSec_deg="10.00" headRotateStart_deg="250.0" headRotateStop_deg="380.0" />
</leg>
</survey>
</document>
We can see that there is one leg element corresponding to the scan position at SP(40, -10). Furthermore, we can see that the tripod platform in data\platforms.xml is referenced, so let's look at that next.
Platform¶
Code(display_xml('python/pyhelios/data/platforms.xml', 'tripod'))
<platform id="tripod" name="TLS Tripod" type="static" drag="0">
<scannerMount x="0" y="0" z="1.5">
</scannerMount>
</platform>
This is a very simple static type platform. Note the scannerMount parameter, indicating an elevation of 1.5 meters above the ground.
Scanner¶
Let us now look at the scanner that is mounted on this platform, the riegl_vz400:
Code(display_xml('python/pyhelios/data/scanners_tls.xml', 'riegl_vz400'))
<scanner id="riegl_vz400" name="RIEGL VZ-400" accuracy_m="0.005" beamDivergence_rad="0.0003" headRotatePerSecMax_deg="60" optics="rotating" pulseFreqs_Hz="100000,300000" pulseLength_ns="5" rangeMin_m="1.5" scanAngleMax_deg="120" scanAngleEffectiveMax_deg="50" scanFreqMin_Hz="3" scanFreqMax_Hz="120">
<FWFSettings beamSampleQuality="3" />
<beamOrigin x="0" y="0" z="0.2">
<rot axis="y" angle_deg="0" />
<rot axis="z" angle_deg="0" />
<rot axis="x" angle_deg="0" />
</beamOrigin>
<headRotateAxis x="0" y="0" z="1" />
</scanner>
We see a lot of scanner-specific settings, including the accuracy (accuracy_m), the beam divergence (beamDivergence_rad), and a list of possible pulse frequences (pulseFreq_Hz). The scanner uses a rotating prism as beam deflector, probably a triangular prism. The actual output window mentioned in the data sheet (+60° to -40° = 100°; see image below) is smaller than the maximum output window (2 x 120° = 240°) to avoid that the beam hits another face of the rotating deflector, which would result in scattering in not-well defined directions. In HELIOS, we define the actual field of view using the scanAngleEffectiveMax_deg and the maximum field of view using the scanAngle_deg. Because the maximum field of view is usually not provided in the datasheet, we have to have a look at the ratio of effective measurement rate to pulse repetition rate, which is the same as the ratio between scanAngleEffectiveMax_deg and scanAngle_deg. For the RIEGL VZ-400, this ratio is 2.4, as shown below in an excerpt from the data sheet. Therefore, we can compute the maximum field of view as 2.4 times the actual field of view, i.e., 100° x 2.4 = 240°. Because the scan angles in HELIOS are defined as half-angles, we divide by two to get the maximum scanAngle_deg of 120°.
Additionally, we see the beamOrigin is set to 0.2 meters in z. Adding this to the platform offset, we arrive at a height of 1.7 meters above ground for the laser beam origin. With the headRotateAxis>-tag, the axis is defined, around which the scanner head rotates. Here, this is the z-axis.
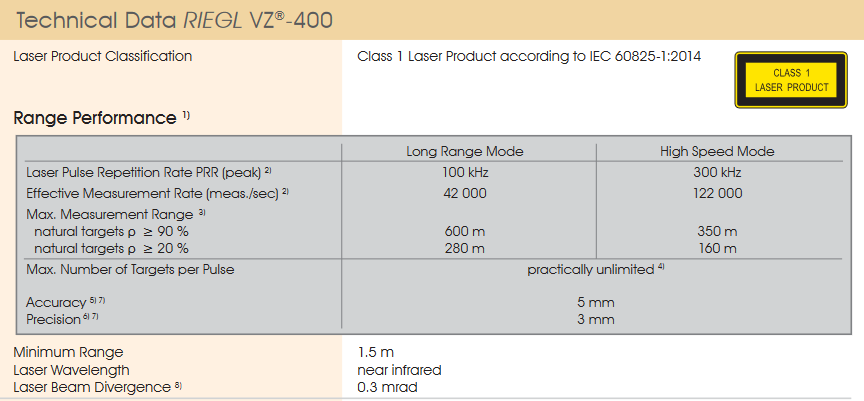
Source: RIEGL Laser Measurement Systems (2017): RIEGL VZ-400 data sheet
Scene¶
Let's take a look at the scene, sphere_xyzloader_demo in data/scenes/voxels/sphere_xyzloader.xml:
Code(display_xml('data/scenes/voxels/sphere_xyzloader.xml', 'sphere_xyzloader_demo'))
<scene id="sphere_xyzloader_demo" name="sphere xyzloader demo">
<part>
<filter type="objloader">
<param type="string" key="filepath" value="data/sceneparts/basic/groundplane/groundplane.obj" />
</filter>
<filter type="scale">
<param type="double" key="scale" value="100" />
</filter>
</part>
<part>
<filter type="xyzloader">
<param type="string" key="filepath" value="data/sceneparts/pointclouds/sphere_dens25000.xyz" />
<param type="string" key="separator" value=" " />
<param type="double" key="voxelSize" value="1.0" />
<!-- Normal estimation using Singular Value Decomposition (SVD)
MODE 1: simple mode / MODE 2: advanced mode for large files, which works in batches -->
<param type="int" key="estimateNormals" value="1" />
<!-- If less than three points fall into one voxel, it is discarded.
To avoid this, a default Normal can be assigned to these voxels with:
<param type="vec3" key="defaultNormal" value="0;0;1" /> -->
<param type="string" key="matfile" value="data/sceneparts/toyblocks/sphere.mtl" />
<param type="string" key="matname" value="Material.008" />
</filter>
<filter type="translate">
<param type="vec3" key="offset" value="0;0;10" />
</filter>
</part>
</scene>
This scene consits of a simple groundplane.obj, which is loaded with the objloader filter and a point cloud of a sphere (sphere_dens25000.xyz) which is loaded with the xyzloader filter. HELIOS++ is transforming this point cloud into a voxel model which is then scanned. The size of the voxels is determined by the value provided to the parameter voxelSize, here 1.0 meters.
Furthermore, providing 1 to the estimateNormals parameter tells HELIOS to compute normals for each voxels. This means that not the normal vector of the outer surface of each voxel cube is used but instead the normal vector computed from the points within the voxel. These normal vectors determine the incidence angle of the beam which in return influences the intensity that is computed for the generated return.
Executing the Simulation¶
Now, we are ready to run the simulation. In Jupyter Notebooks, we can run external commands with the !command syntax, but you can also just run it from the command line. The -q flag stands for "quiet" and achieves that in the log, only errors are reported.
!helios data/surveys/voxels/tls_sphere_xyzloader.xml "-q"
output_path = find_playback_dir("data/surveys/voxels/tls_sphere_xyzloader.xml")
The results¶
Now we can display a 3D plot of the result.
import numpy as np
import matplotlib.pyplot as plt
from pathlib import Path
print('Loading points from', Path(output_path))
points = np.loadtxt(Path(output_path) / 'leg000_points.xyz')
Loading points from E:\Software\_helios_versions\helios\output\tls_sphere_xyzloader\2024-05-28_18-32-00
# Matplotlib figures.
fig = plt.figure(figsize=(9,7))
#settings for a discrete colorbar
N=2
cmap=plt.get_cmap('jet',N)
# Scatter plot of the point cloud (coloured by hitObjectId).
ax = fig.add_subplot(projection='3d')
sc = ax.scatter(points[:, 0], points[:, 1], points[:, 2], c=points[:, 8], cmap=cmap, s=0.02, label='scene')
# Add axis labels.
ax.set_xlabel('$X$')
ax.set_ylabel('$Y$')
ax.set_zlabel('$Z$')
# set equal axes
box = (np.ptp(points[:, 0]), np.ptp(points[:, 1]), np.ptp(points[:, 2]))
ax.set_box_aspect(box)
cbar = plt.colorbar(sc, ticks=[1/4, 3/4])
cbar.set_label('Object ID', fontsize=15)
cbar.ax.set_yticklabels(['0', '1'])
# Display results
plt.show()

Let's look only at the sphere and investigate the intensity values.
# select only points with object ID = 1
sphere_points = points[points[:, 8] == 1, :]
# Matplotlib figures.
fig = plt.figure(figsize=(9,7))
# Scatter plot of only the sphere point cloud (coloured by Intensity).
ax = fig.add_subplot(projection='3d')
sc = ax.scatter(sphere_points[:, 0], sphere_points[:, 1], sphere_points[:, 2], c=sphere_points[:, 3], cmap="GnBu", s=0.1, label='scene')
# Add axis labels.
ax.set_xlabel('$X$')
ax.set_ylabel('$Y$')
ax.set_zlabel('$Z$')
# set equal axes
box = (np.ptp(sphere_points[:, 0]), np.ptp(sphere_points[:, 1]), np.ptp(sphere_points[:, 2]))
ax.set_box_aspect(box)
cbar = plt.colorbar(sc)
cbar.set_label('Intensity', fontsize=15)
plt.show()

It can be seen that the intensity values are highest in the areas that are closer to the scanner and where the incidence angle of the beam is large (i.e. the beam direction is almost identical to the normal vector of the surface).