Matrix Formalism of the Newton-Euler equations¶
Renato Naville Watanabe
In this notebook will be shown two examples of how to use a matrix formalism to perform inverse dynamics analysis. It does not consist a comprehensive treatise about the subject. It is rather an introduction based on examples. Nevertheless, the reader of this notebook will have sufficient knowledge to read recent texts on biomechanics and other multibody dynamic analysis.
Inverse dynamics¶
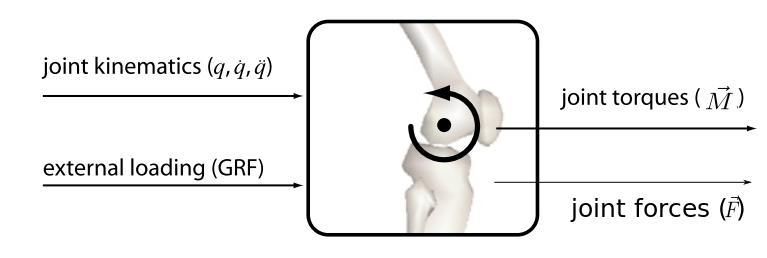
For the inverse dynamics analysis, we will obtain the joint torques and forces, from the joint kinematics and external forces.
As an example, we will consider the problem of estimating the forces and torques in the ankle and knee joints during the gait, considering a 3D movement. At this point, we consider that the accelerations, angular velocities, angular accelerations, masses, moments of inertia and rotation matrices necessary to compute the forces and moments are known.
The free-body diagram of the gait, considering a 3D movement is very similar to the 2D case. The equations of forces and moments are described by the Newton-Euler equations (for a revision on Tridimensional Newton-Euler equations click here): \begin{align} \overrightarrow{F_A} + \overrightarrow{GRF} + m_F\overrightarrow{g} &= m_F\overrightarrow{a_{cm_F}}\\ \overrightarrow{M_A} + \overrightarrow{M_{GRF}}+ \overrightarrow{M_{FA}}&=I_F\overrightarrow{\dot{\omega_F}} + \overrightarrow{\omega_F} \times (I_F\overrightarrow{\omega_F})\\ \overrightarrow{F_K} -\overrightarrow{F_A} + m_S\overrightarrow{g} &= m_S\overrightarrow{a_{cm_S}}\\ \overrightarrow{M_K} - \overrightarrow{M_A} + \overrightarrow{M_{FA}} + \overrightarrow{M_{FK}} &= I_S\overrightarrow{\dot{\omega_S}} + \overrightarrow{\omega_S} \times (I_S\overrightarrow{\omega_S}) \end{align} where
- $\overrightarrow{g} = -9.81\hat{j}$;
- $m_F$ and $m_S$ are the masses of the foot and the shank, respectively;
- $\overrightarrow{GRF}$ is the ground reaction force being applied to the foot;
- $\overrightarrow{a_{cm_F}}$ and $\overrightarrow{a_{cm_S}}$ are the accelerations of the center of mass of the foot and the shank, respectively;
- $\overrightarrow{\omega_F}$ and $\overrightarrow{\omega_S}$ are the angular accelerations of the foot and shank, respectively, described at a basis attached to the segment, and $\overrightarrow{\dot{\omega_F}}$ and $\overrightarrow{\dot{\omega_S}}$ are their time-derivatives;
- $I_S$ and $I_F$ are the matrices of inertia of the shank and the foot, respectively;
- $\overrightarrow{F_K}$, $\overrightarrow{F_A}$, $\overrightarrow{M_A}$ and $\overrightarrow{M_A}$ are the forces and moments at the ankle and knee joints, respectively
Note that each of these equations have components at each of the three directions. Additionally, note that the equations of the forces are described in the global basis, and the equations of the moments must be described in the basis attached to the segment relative to that equation. So, it is a good idea to make this clear with a more precise notation. We will denote as a superscript in the vectors the segment where the basis that we are describing the vector is fixed. So for example, $\overrightarrow{M_A^F}$ is the vector of the moment due to the muscle forces of the ankle, described in the basis fixed at the foot. So, the equations can be rewritten as:
\begin{align} \overrightarrow{F_A^G} + \overrightarrow{GRF^G} + m_F\overrightarrow{g^G} &= m_F\overrightarrow{a_{cm_F}^G}\\ \overrightarrow{M_A^F} + \overrightarrow{M_{GRF}^F}+ \overrightarrow{M_{FA}^F}&=I_F\overrightarrow{\dot{\omega_F^F}} + \overrightarrow{\omega_F^F} \times (I_F\overrightarrow{\omega_F^F})\\ \overrightarrow{F_K^G} -\overrightarrow{F_A^G} + m_S\overrightarrow{g^G} &= m_S\overrightarrow{a_{cm_S}^G}\\ \overrightarrow{M_K^S} - \overrightarrow{M_A^S} + \overrightarrow{M_{FA}^S} + \overrightarrow{M_{FK}^S} &= I_S\overrightarrow{\dot{\omega_S^S}} + \overrightarrow{\omega_S^S} \times (I_S\overrightarrow{\omega_S^S}) \end{align}where the superscript $G$ denotes the global frame of reference, the superscript $S$ denotes the frame of reference in the shank and the superscript $F$ denotes the frame of reference at the foot.
The moments due to the ground reaction force, the force at the ankle and the force at the knee are computed by cross-multiplying them by their moment-arms. As the forces and the moment-arms are described in the global basis, we must multiply them by the rotation matrix of the basis corresponding to the segment. So, the equations can be rewritten as:
\begin{align} \overrightarrow{F_A^G} + \overrightarrow{GRF^G} + m_F\overrightarrow{g^G} &= m_F\overrightarrow{a_{cm_F}^G}\\ \overrightarrow{M_A^F} + R_F(\overrightarrow{r_{cop/cm_F}^G}\times \overrightarrow{GRF^G})+ R_F(\overrightarrow{r_{A/cm_F}^G}\times \overrightarrow{F_A}^G)&=I_F\overrightarrow{\dot{\omega_F^F}} + \overrightarrow{\omega_F^F} \times (I_F\overrightarrow{\omega_F^F})\\ \overrightarrow{F_K^G} -\overrightarrow{F_A^G} + m_S\overrightarrow{g^G} &= m_S\overrightarrow{a_{cm_S}^G}\\ \overrightarrow{M_K^S} - \overrightarrow{M_A^S} - R_S(\overrightarrow{r_{A/cm_S}^G}\times \overrightarrow{F_A^G}) + R_S(\overrightarrow{r_{K/cm_S}^G}\times \overrightarrow{F_K^G}) &= I_S\overrightarrow{\dot{\omega_S^S}} + \overrightarrow{\omega_S^S} \times (I_S\overrightarrow{\omega_S^S}) \end{align}where $R_S$ is the rotation matrix of the basis attached to the shank and $R_F$ is the rotation matrix of the basis attached to the foot.
Now, we can note that the vectors $\overrightarrow{M_K^S}$ and $\overrightarrow{M_K^F}$ are the same vectors described in different basis. So we could use only one of the descriptions and use rotation matrices to convert from one to another. To pass the vector from the foot coordinates to the shank coordinate, we must first multiply it by the inverted rotation matrix of the foot and then multiply it by the rotation matrix of the shank. So, $\overrightarrow{M_A^S} = R_SR_F^{-1}\overrightarrow{M_A^F}$ and the equations above can be rewritten as:
\begin{align} \overrightarrow{F_A^G} + \overrightarrow{GRF^G} + m_F\overrightarrow{g^G} &= m_F\overrightarrow{a_{cm_F}^G}\\ \overrightarrow{M_A^F} + R_F(\overrightarrow{r_{cop/cm_F}^G}\times \overrightarrow{GRF^G})+ R_F(\overrightarrow{r_{A/cm_F}^G}\times \overrightarrow{F_A}^G)&=I_F\overrightarrow{\dot{\omega_F^F}} + \overrightarrow{\omega_F^F} \times (I_F\overrightarrow{\omega_F^F})\\ \overrightarrow{F_K^G} -\overrightarrow{F_A^G} + m_S\overrightarrow{g^G} &= m_S\overrightarrow{a_{cm_S}^G}\\ \overrightarrow{M_K^S} - R_SR_F^{-1}\overrightarrow{M_A^F} - R_S(\overrightarrow{r_{A/cm_S}^G}\times \overrightarrow{F_A^G}) + R_S(\overrightarrow{r_{K/cm_S}^G}\times \overrightarrow{F_K^G}) &= I_S\overrightarrow{\dot{\omega_S^S}} + \overrightarrow{\omega_S^S} \times (I_S\overrightarrow{\omega_S^S}) \end{align}Now, we divide the equations above in the matrices defined previously: \begin{equation} \underbrace{\left[\begin{array}{cccc} m_FI_3& [0]& [0]& [0]\\ [0]& I_F & [0] & [0] \\ [0] &[0] & m_SI_3& [0] \\ [0] & [0] & [0] & I_S\end{array}\right]}_{M}\cdot\left[\begin{array}{c}\overrightarrow{a_{cm_F}^G}\\\overrightarrow{\dot{\omega_F^F}}\\\overrightarrow{a_{cm_S}^G}\\\overrightarrow{\dot{\omega_S^S}} \\ \end{array}\right] = \underbrace{\left[\begin{array}{c}[0]\\ - \overrightarrow{\omega_F^F} \times (I_F\overrightarrow{\omega_F^F}) \\ [0] \\ - \overrightarrow{\omega_S^S} \times (I_S\overrightarrow{\omega_S^S}) \end{array}\right]}_{C} + \underbrace{\left[\begin{array}{c} m_F\overrightarrow{g^G}\\ [0]\\ m_S\overrightarrow{g^G} \\ [0] \end{array}\right]}_{G} + \underbrace{\left[\begin{array}{c} \overrightarrow{F_A^G}\\ \overrightarrow{M_A^F}+R_F(\overrightarrow{r_{A/cm_F}^G}\times \overrightarrow{F_A}^G)\\ \overrightarrow{F_K^G} - \overrightarrow{F_A^G} \\ \overrightarrow{M_K^S} - R_SR_F^{-1}\overrightarrow{M_A^F} - R_S(\overrightarrow{r_{A/cm_S}^G}\times \overrightarrow{F_A^G}) + R_S(\overrightarrow{r_{K/cm_S}^G}\times \overrightarrow{F_K^G}) \end{array}\right]}_{Q} + \underbrace{\left[\begin{array}{c} \overrightarrow{GRF^G}\\ R_F(\overrightarrow{r_{cop/cm_F}^G}\times \overrightarrow{GRF^G})\\ [0] \\ [0] \end{array}\right]}_{E} \end{equation}
where $I_3$ is the identity matrix 3x3.
To perform the inverse dynamics, we still cannot isolate the vector of forces and moments. As the vector $F$ has cross-products we must define the a new operator that performs the cross-product through a matrix multiplication.
We can note that the cross-product between the vectors $\vec{v}$ and $\vec{w}$ has the following result:
\begin{equation} \vec{v} \times \vec{w} = \left[\begin{array}{c}v_x\\v_y\\v_z \end{array}\right] \times \left[\begin{array}{c}w_x\\w_y\\w_z \end{array}\right] = \left[\begin{array}{c}v_yw_z - v_zw_y\\v_zw_x - v_xw_z\\v_xw_y - v_yw_x \end{array}\right] = \left[\begin{array}{ccc}0&-v_z&v_y\\v_z&0&-v_x\\-v_y&v_x&0 \end{array}\right]\cdot\left[\begin{array}{c}w_x\\w_y\\w_z \end{array}\right] \end{equation}So we can define a new operator known as skew-symmetric matrix:
\begin{equation} S(\vec{v}) \triangleq \left[\begin{array}{ccc}0&-v_z&v_y\\v_z&0&-v_x\\-v_y&v_x&0 \end{array}\right] \end{equation}Therefore:
\begin{equation} \vec{v} \times \vec{w} = S(\vec{v})\cdot\vec{w} \end{equation}Now, we will use this operator in the equation we found previously:
\begin{equation} \left[\begin{array}{cccc} m_FI_3& [0]& [0]& [0]\\ [0]& I_F & [0] & [0] \\ [0] &[0] & m_SI_3& [0] \\ [0] & [0] & [0] & I_S\end{array}\right]\cdot\left[\begin{array}{c}\overrightarrow{a_{cm_F}^G}\\\overrightarrow{\dot{\omega_F^F}}\\\overrightarrow{a_{cm_S}^G}\\\overrightarrow{\dot{\omega_S^S}} \\ \end{array}\right] = \left[\begin{array}{c}[0]\\ - \overrightarrow{\omega_F^F} \times (I_F\overrightarrow{\omega_F^F}) \\ [0] \\ - \overrightarrow{\omega_S^S} \times (I_S\overrightarrow{\omega_S^S}) \end{array}\right] + \left[\begin{array}{c} m_F\overrightarrow{g^G}\\ [0]\\ m_S\overrightarrow{g^G} \\ [0] \end{array}\right] + \left[\begin{array}{c} \overrightarrow{F_A^G}\\ \overrightarrow{M_A^F}+R_F(S(\overrightarrow{r_{A/cm_F}^G})\cdot\overrightarrow{F_A}^G)\\ \overrightarrow{F_K^G} - \overrightarrow{F_A^G} \\ \overrightarrow{M_K^S} - R_SR_F^{-1}\overrightarrow{M_A^F} - R_S(S(\overrightarrow{r_{A/cm_S}^G})\cdot\overrightarrow{F_A^G}) + R_S(S(\overrightarrow{r_{K/cm_S}^G})\cdot\overrightarrow{F_K^G}) \end{array}\right] + \left[\begin{array}{c} \overrightarrow{GRF^G}\\ R_F(\overrightarrow{r_{cop/cm_F}^G}\times \overrightarrow{GRF^G})\\ [0] \\ [0] \end{array}\right] \end{equation}Now it is possible to write the vector $F$ as multiplication of a matrix by a vector:
\begin{equation} \left[\begin{array}{cccc} m_FI_3& [0]& [0]& [0]\\ [0]& I_F & [0] & [0] \\ [0] &[0] & m_SI_3& [0] \\ [0] & [0] & [0] & I_S\end{array}\right]\cdot\left[\begin{array}{c}\overrightarrow{a_{cm_F}^G}\\\overrightarrow{\dot{\omega_F^F}}\\\overrightarrow{a_{cm_S}^G}\\\overrightarrow{\dot{\omega_S^S}} \\ \end{array}\right] = \left[\begin{array}{c}[0]\\ - \overrightarrow{\omega_F^F} \times (I_F\overrightarrow{\omega_F^F}) \\ [0] \\ - \overrightarrow{\omega_S^S} \times (I_S\overrightarrow{\omega_S^S}) \end{array}\right] + \left[\begin{array}{c} m_F\overrightarrow{g^G}\\ [0]\\ m_S\overrightarrow{g^G} \\ [0] \end{array}\right] + \left[\begin{array}{ccc} I_3& [0]& [0]& [0]\\ R_FS\left(\overrightarrow{r_{A/cm_F}^G}\right)&I_3& [0]& [0]\\ -I_3& [0]& I_3 & [0] \\ -R_SS\left(\overrightarrow{r_{A/cm_S}^G}\right)& - R_SR_F^{-1} & R_SS\left(\overrightarrow{r_{K/cm_S}^G}\right) & I_3 \end{array}\right]\cdot\left[\begin{array}{c} \overrightarrow{F_A^G}\\ \overrightarrow{M_A^F}\\ \overrightarrow{F_K^G}\\ \overrightarrow{M_K^S}\end{array}\right] + \left[\begin{array}{c} \overrightarrow{GRF^G}\\ R_F(\overrightarrow{r_{cop/cm_F}^G}\times \overrightarrow{GRF^G})\\ [0] \\ [0] \end{array}\right] \end{equation}So, the final equation to compute the forces and torques is obtained by multiplying everything by the inverse of the matrix multipliying the vector of forces:
\begin{equation} \left[\begin{array}{c} \overrightarrow{F_A^G}\\ \overrightarrow{M_A^F}\\ \overrightarrow{F_K^G}\\ \overrightarrow{M_K^S}\end{array}\right] = \left[\begin{array}{ccc} I_3& [0]& [0]& [0]\\ R_FS\left(\overrightarrow{r_{A/cm_F}^G}\right)&I_3& [0]& [0]\\ -I_3& [0]& I_3 & [0] \\ -R_SS\left(\overrightarrow{r_{A/cm_S}^G}\right)& - R_SR_F^{-1} & R_SS\left(\overrightarrow{r_{K/cm_S}^G}\right) & I_3 \end{array}\right]^{-1}\cdot\left(\left[\begin{array}{cccc} m_FI_3& [0]& [0]& [0]\\ [0]& I_F & [0] & [0] \\ [0] &[0] & m_SI_3& [0] \\ [0] & [0] & [0] & I_S\end{array}\right]\cdot\left[\begin{array}{c}\overrightarrow{a_{cm_F}^G}\\\overrightarrow{\dot{\omega_F^F}}\\\overrightarrow{a_{cm_S}^G}\\\overrightarrow{\dot{\omega_S^S}} \\ \end{array}\right] - \left[\begin{array}{c}[0]\\ - \overrightarrow{\omega_F^F} \times (I_F\overrightarrow{\omega_F^F}) \\ [0] \\ - \overrightarrow{\omega_S^S} \times (I_S\overrightarrow{\omega_S^S}) \end{array}\right] -\left[\begin{array}{c} \overrightarrow{GRF^G}\\ R_F(\overrightarrow{r_{cop/cm_F}^G}\times \overrightarrow{GRF^G})\\ [0] \\ [0] \end{array}\right] - \left[\begin{array}{c} m_F\overrightarrow{g^G}\\ [0]\\ m_S\overrightarrow{g^G} \\ [0] \end{array}\right]\right) \end{equation}With the last equation, we can obtain all the forces and moments using only one line of code. Computationally, it is less prone to errors and more efficient.
So, generically, the steps to perform the analysis of inverse dynamics is:
write the equations of Newton-Euler for each segment. Write explicitly the basis at which each vector is described.
use the rotation matrices of the basis to pass the description of a vector to another basis. Use it in a way that the same vector is described at just a single frame of reference.
write the cross-products as a product between the skew-symmetric matrix $S$ of the first vector and the second vector.
write the equations in the matrix format, repeated here:
write explicitly the vector containing the unknown forces and moments $Q$, as a multiplication of a matrix and vector containing only the unknown forces.
isolate the vector containing only the unknown forces by multiplying the whole equation by the inverse of the matrix multiplying the vector with the forces.
Problems¶
Solve the problems 18.3.20 and 18.3.24 of the Ruina and Rudra's book by using the Lagrangian formalism (it is much easier than use the Newton-Euler formalism) and then use the matrix formalism to obtain the expressions of the angular accelerations.
Write the matrices to find the forces and torques in a tridimensional double pendulum, consisted of two cylindrical bars. Consider that you know all the masses, moments of inertia, rotation matrices, accelerations, angular velocities and angular accelerations necessary to solve the problem.
References¶
YAMAGUCHI, G. T. Dynamic modeling of musculoskeletal motion: a vectorized approach for biomechanical analysis in three dimensions., 2001
CRAIG, J. Introduction to robotics. , 1989
JAIN, A. Robot and multibody dynamics. , 2011
SPONG, M. W.; HUTCHINSON, S.; VIDYASAGAR, M. Robot modeling and control., 2006
ERDEMIR, A. et al. Model-based estimation of muscle forces exerted during movements. Clinical Biomechanics, v. 22, n. 2, p. 131–154, 2007.
STANEV, D.; MOUSTAKAS, K. Simulation of constrained musculoskeletal systems in task space. IEEE Transactions on Biomedical Engineering, v. 65, n. 2, p. 307–318, 2018.
ZAJAC FE, GORDON ME , Determining muscle's force and action in multi-articular movement. Exercise and Sport Sciences Reviews, 17, 187-230. , 1989
RUINA A, RUDRA P. Introduction to Statics and Dynamics. Oxford University Press. , 2015