
Calibration with Markers¶
An ArUco marker is a synthetic square marker composed by a wide black border and a inner binary matrix which determines its identifier (id). The black border facilitates its fast detection in the image and the binary codification allows its identification and the application of error detection and correction techniques. The marker size determines the size of the internal matrix. For instance a marker size of 4x4 is composed by 16 bits.
The ArUco module can be used to calibrate a camera. Camera calibration consists in obtaining the camera intrinsic parameters and distortion coefficients. Camera calibration is usually performed using the OpenCV calibrateCamera() function. This function requires some correspondences between environment points and their projection in the camera image from different viewpoints. In general, these correspondences are obtained from the corners of chessboard patterns. Calibrating using ArUco is much more versatile than using traditional chessboard patterns, since it allows occlusions or partial views.
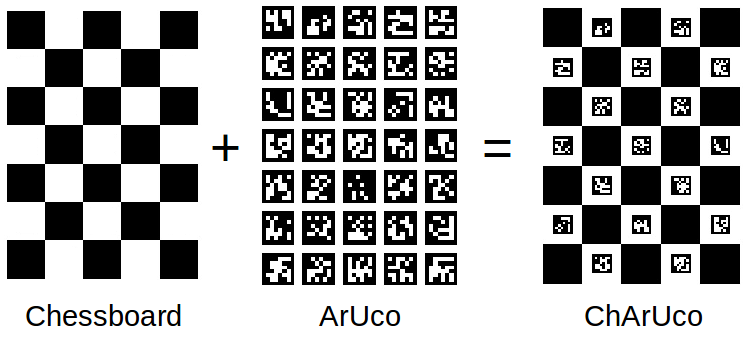
ChArUco boards combine ArUco markers with a standard checkerboard. ChArUco board corners provide much more accuratacy in comparison to the ArUco marker corners. Calibration using a standard Board should only be employed in those scenarios where the ChArUco boards cannot be employed because of any kind of restriction.
References¶
- OpenCV 4.0: ArUco Tutorials
- Automatic generation and detection of highly reliable fiducial markers under occlusion
- Notes using aruco markers
Contents¶
- Stereo Calibration
- ChArUco Target Board
- Get Calibration Images
- Camera Intrinsics
- Camera Extrinsics
- Yaml
- Appendix A: Calibration
- Appendix B: Blurry
Stereo Calibration¶
- Let's calibrate each camera individually and find its intrinsic parameters
- Use this data to then calibrate the two cameras together and find their extrinsic parameters
# reload library
%load_ext autoreload
%autoreload 2
import numpy as np
import cv2
import cv2.aruco as aruco
from matplotlib import pyplot as plt
from opencv_camera import StereoCamera
from opencv_camera import coverage
from opencv_camera import visualizeDistortion
from opencv_camera import drawEpipolarLines
from opencv_camera import mosaic
from colorama import Fore
from helpers import blurry
from helpers import Calibrate
from helpers import get_images
np.set_printoptions(precision=3)
np.set_printoptions(suppress=True)
ChArUco Target Board¶
Dictionary¶
The markers are generated according to a dictionary which defines the number of horizontal and vertical bits for each marker and the total number of valid values that are contained. For example, aruco.DICT_4X4_50 defines a 4x4 2D marker with 50 unique marker ids in it. Once the dictionary is created, individual markers can be drawn.
dictionary = aruco.Dictionary_get(aruco.DICT_4X4_50)
dictionary.drawMarker(id, sidePixels[, _img[, borderBits]]) -> _img
Boards¶
The board structure has the following useful members/methods:
chessboardCornerscreatedictionarydrawgetChessboardSizegetMarkerLengthgetSquareLengthidsnearestMarkerCornersnearestMarkerIdxobjPoints
Found markers can be drawn on an image using aruco.drawDetectedMarkers(img, corners, ids).
dictionary = aruco.Dictionary_get(aruco.DICT_4X4_50)
x = 5 # horizontal
y = 7 # vertical
sqr = 0.014 # solid black squares
mrk = 0.0105 # markers, must be smaller than squares
board = aruco.CharucoBoard_create(
x,y,
sqr,
mrk,
dictionary)
tgt = board.draw((1000,1000))
plt.imshow(tgt, cmap="gray")
plt.axis("off")
plt.title("Target 5x7, DICT_4X4_50");
cv2.imwrite("board.png", tgt)
True

Get Calibration Images¶
# the left/right images are stored together as one image. We
# need to read in each image and cut it in half to separate out
# the left/right
imgsL, imgsR = get_images("aruco-imgs-2/*.png")
Found 60 images at aruco-imgs-2/*.png
plt.figure(figsize=(10,10))
mos = mosaic(imgsL)
plt.imshow(mos, cmap="gray")
plt.title(f"{len(imgsL)} Left Images @ {imgsL[0].shape}")
plt.axis("off");

# Ideally we don't want any blurry images getting into the dataset
for i, (l, r) in enumerate(zip(imgsL, imgsR)):
thres = 200
blurl, vall = blurry(l, thres)
cl = Fore.RED if blurl is True else ""
blurr, valr = blurry(r, thres)
cr = Fore.RED if blurr is True else ""
if blurl or blurr:
print(f"{cl}{i:3}: left: {blurl},{vall}{Fore.RESET}", end=" ")
print(f"{cr}right: {blurr},{valr}{Fore.RESET}", end=" ")
print(f"threshold ratio: {(vall - thres)/thres:.2f} / {(valr - thres)/thres:.2f}")
7: left: False,217 right: True,156 threshold ratio: 0.09 / -0.22 8: left: False,255 right: True,194 threshold ratio: 0.28 / -0.03 9: left: False,243 right: True,180 threshold ratio: 0.21 / -0.10 12: left: False,259 right: True,130 threshold ratio: 0.29 / -0.35 14: left: False,285 right: True,192 threshold ratio: 0.42 / -0.04 23: left: False,279 right: True,120 threshold ratio: 0.40 / -0.40 33: left: False,283 right: True,175 threshold ratio: 0.41 / -0.12 34: left: False,289 right: True,188 threshold ratio: 0.45 / -0.06 35: left: False,240 right: True,188 threshold ratio: 0.20 / -0.06 57: left: True,196 right: False,284 threshold ratio: -0.02 / 0.42
# I think background is giving blurry warnings, not calibration target
num = 7
plt.figure(figsize=(20,5))
plt.imshow(np.hstack((imgsL[num], imgsR[num])), cmap="gray")
plt.axis("off")
plt.title(num);

Camera Intrinsics¶
# left camera parameters
cal = Calibrate(dictionary, board)
rms1, M1, d1, r1, t1, objpoints, imgpoints_l = cal.calibrate(imgsL)
# print(len(objpoints), objpoints[0].shape, len(imgpoints_l), imgpoints_l[0].shape)
print('RMS:', rms1, 'px')
print('Camera Matrix:', M1)
print('Dist Coeffs:', d1)
i=5 # select image id
plt.figure(figsize=(20,10))
img_undist = cv2.undistort(imgsL[i],M1,d1,None)
plt.subplot(1,2,1)
plt.imshow(imgsL[i], cmap='gray')
plt.title("Raw image @ {}".format(imgsL[i].shape))
plt.axis("off")
plt.subplot(1,2,2)
plt.imshow(img_undist, cmap='gray')
plt.title("Corrected image")
plt.axis("off");
RMS: 0.2177539509799831 px Camera Matrix: [[1064.946 0. 627.131] [ 0. 1064.585 369.801] [ 0. 0. 1. ]] Dist Coeffs: [[ 0.119 -0.539 0. 0.001 0.704]]

# right camera parameters
rms2, M2, d2, r2, t2, objpoints, imgpoints_r = cal.calibrate(imgsR)
print('RMS:', rms2, 'px')
print('Camera Matrix:', M2)
print('Dist Coeffs:', d2)
i=5 # select image id
plt.figure(figsize=(20,10))
img_undist = cv2.undistort(imgsR[i],M2,d2,None)
plt.subplot(1,2,1)
plt.imshow(imgsR[i], cmap='gray')
plt.title("Raw image @ {}".format(imgsR[i].shape))
plt.axis("off")
plt.subplot(1,2,2)
plt.imshow(img_undist, cmap='gray')
plt.title("Corrected image")
plt.axis("off");
RMS: 0.2155775919809732 px Camera Matrix: [[1056.75 0. 631. ] [ 0. 1056.451 366.532] [ 0. 0. 1. ]] Dist Coeffs: [[ 0.123 -0.592 0.001 -0.002 0.834]]

# draw image points mapped across camera focal plane
plt.figure(figsize=(20,10))
plt.subplot(121);plt.imshow(coverage(imgsL[0].shape[:2], np.vstack(imgpoints_l)));plt.axis("off");
plt.subplot(122);plt.imshow(coverage(imgsR[0].shape[:2], np.vstack(imgpoints_r)));plt.axis("off");

h,w = imgsL[0].shape[:2]
visualizeDistortion(M1, d1, h, w)
h,w = imgsR[0].shape[:2]
visualizeDistortion(M2, d2, h, w);


# eimg = drawEpipolarLines(imgpoints_l[0],imgpoints_r[0],imgsL[0],imgsR[0])
Camera Extrinsics¶
# some markers are obscured, we need to weed out the
# points that are not in BOTH the left and right images
objpts = []
rpts = []
lpts = []
for o,l,r in zip(objpoints,imgpoints_l,imgpoints_r):
# must have all the same number of points for calibration
if o.shape[:2] == l.shape[:2] == r.shape[:2]:
objpts.append(o)
rpts.append(r)
lpts.append(l)
else:
print("bad points:", o.shape, l.shape, r.shape)
bad points: (24, 1, 3) (24, 1, 2) (16, 1, 2) bad points: (24, 1, 3) (24, 1, 2) (16, 1, 2) bad points: (24, 1, 3) (24, 1, 2) (16, 1, 2) bad points: (24, 1, 3) (24, 1, 2) (16, 1, 2) bad points: (24, 1, 3) (24, 1, 2) (16, 1, 2) bad points: (24, 1, 3) (24, 1, 2) (22, 1, 2) bad points: (24, 1, 3) (24, 1, 2) (22, 1, 2) bad points: (24, 1, 3) (16, 1, 2) (24, 1, 2) bad points: (24, 1, 3) (16, 1, 2) (24, 1, 2) bad points: (24, 1, 3) (16, 1, 2) (24, 1, 2) bad points: (24, 1, 3) (17, 1, 2) (24, 1, 2)
print('obj pts', len(objpts))
print('imgpoints left', len(lpts))
print('imgpoints right', len(rpts))
flags = 0
# flags |= cv2.CALIB_FIX_INTRINSIC
# flags |= cv2.CALIB_FIX_PRINCIPAL_POINT
flags |= cv2.CALIB_USE_INTRINSIC_GUESS
# flags |= cv2.CALIB_FIX_FOCAL_LENGTH
flags |= cv2.CALIB_ZERO_DISPARITY
# flags |= cv2.CALIB_FIX_ASPECT_RATIO
# flags |= cv2.CALIB_ZERO_TANGENT_DIST
# flags |= cv2.CALIB_RATIONAL_MODEL
# flags |= cv2.CALIB_SAME_FOCAL_LENGTH
# flags |= cv2.CALIB_FIX_K3
# flags |= cv2.CALIB_FIX_K4
# flags |= cv2.CALIB_FIX_K5
stereocalib_criteria = (
cv2.TERM_CRITERIA_MAX_ITER +
cv2.TERM_CRITERIA_EPS,
100,
1e-5)
h, w = imgsL[0].shape[:2]
ret, M1, d1, M2, d2, R, T, E, F = cv2.stereoCalibrate(
objpts,
lpts,
rpts,
M1, d1,
M2, d2,
(w,h),
criteria=stereocalib_criteria,
flags=flags)
print('-'*50)
# print('Image: {}x{}'.format(*imgs_l[0].shape[:2]))
# print('{}: {}'.format(marker_type, marker_size))
print('Intrinsic Camera Parameters')
print('-'*50)
print(' [Camera 1]')
# print(' cameraMatrix_1', M1)
print(' f(x,y): {:.1f} {:.1f} px'.format(M1[0,0], M1[1,1]))
print(' principlePoint(x,y): {:.1f} {:.1f} px'.format(M1[0,2], M1[1,2]))
print(' distCoeffs', d1[0])
print(' [Camera 2]')
# print(' cameraMatrix_2', M2)
print(' f(x,y): {:.1f} {:.1f} px'.format(M2[0,0], M2[1,1]))
print(' principlePoint(x,y): {:.1f} {:.1f} px'.format(M2[0,2], M2[1,2]))
print(' distCoeffs', d2[0])
print('-'*50)
print('Extrinsic Camera Parameters')
print('-'*50)
print(' Rotation between left/right camera\n', R)
print(' Translation between left/right camera[meter]', T.T)
print(' Essential matrix\n', E)
print(' Fundamental matrix\n', F)
obj pts 49 imgpoints left 49 imgpoints right 49 -------------------------------------------------- Intrinsic Camera Parameters -------------------------------------------------- [Camera 1] f(x,y): 1061.4 1060.8 px principlePoint(x,y): 626.2 368.0 px distCoeffs [ 0.123 -0.545 0. 0.001 0.657] [Camera 2] f(x,y): 1059.1 1058.6 px principlePoint(x,y): 629.4 368.4 px distCoeffs [ 0.121 -0.528 0.002 -0.002 0.634] -------------------------------------------------- Extrinsic Camera Parameters -------------------------------------------------- Rotation between left/right camera [[ 1. 0.001 0. ] [-0.001 1. -0.002] [-0. 0.002 1. ]] Translation between left/right camera[meter] [[-0.03 -0. -0. ]] Essential matrix [[-0. 0. -0. ] [-0. 0. 0.03] [ 0. -0.03 0. ]] Fundamental matrix [[-0. 0. -0.021] [-0. 0. 2.542] [ 0.025 -2.54 1. ]]
# just playing around with calculating the fundamental matrix
from opencv_camera import findFundamentalMat
ff = findFundamentalMat(M1,M2,R,T, True)
print(ff)
print(ff/ff[2,2]) # what is above
[[-0. 0. -0.006] [-0. 0. 0.681] [ 0.007 -0.681 0.268]] [[-0. 0. -0.021] [-0. 0. 2.542] [ 0.025 -2.54 1. ]]
sc = StereoCamera(M1,d1,M2,d2,R,T.T,F,E)
print(sc)
Camera 1 -------------------------- focalLength(x,y): 1061.4 1060.8 px principlePoint(x,y): 626.2 368.0 px distortionCoeffs: [[ 0.123 -0.545 0. 0.001 0.657]] Camera 2 -------------------------- focalLength(x,y): 1059.1 1058.6 px principlePoint(x,y): 629.4 368.4 px distortionCoeffs: [[ 0.121 -0.528 0.002 -0.002 0.634]] Extrinsic Camera Parameters ------- Translation between Left/Right Camera: [[-0.03 -0. -0. ]] Rotation between Left/Right Camera: [[ 1. 0.001 0. ] [-0.001 1. -0.002] [-0. 0.002 1. ]] Essential Matrix: [[-0. 0. -0. ] [-0. 0. 0.03] [ 0. -0.03 0. ]] Fundatmental Matrix: [[-0. 0. -0.021] [-0. 0. 2.542] [ 0.025 -2.54 1. ]]
Yaml¶
sc.to_yaml("camera.yml")
!cat camera.yml
E: - - -2.8174899947524255e-08 - 2.7415304916809837e-05 - -0.0002389032952606705 - - -2.9212397965334014e-05 - 6.218118030504189e-05 - 0.029815735359773356 - - 0.00028005159676246666 - -0.02981537793335913 - 6.223120966939518e-05 F: - - -2.262335840319361e-09 - 2.2025548484713277e-06 - -0.021169044301383725 - - -2.346799992156949e-06 - 4.998121271549909e-06 - 2.541864877098067 - - 0.024681676944747176 - -2.5401263981000346 - 1.0 K1: - - 1061.3562964122361 - 0.0 - 626.1944932559309 - - 0.0 - 1060.7724755609368 - 367.95849020503454 - - 0.0 - 0.0 - 1.0 K2: - - 1059.0809033118926 - 0.0 - 629.4252940998015 - - 0.0 - 1058.5587364517041 - 368.4308171719573 - - 0.0 - 0.0 - 1.0 R: - - 0.9999990440508459 - 0.0013821155265650302 - 4.0670203258133864e-05 - - -0.0013820276450845317 - 0.9999968674960928 - -0.002086863098059504 - - -4.355436174818837e-05 - 0.002086804895779257 - 0.9999978216717997 T: - - -0.02981580144363504 - -0.00023884556323122585 - -2.7913816447635e-05 d1: - - 0.12288837841693016 - -0.5447522590941763 - 8.862614532275977e-05 - 0.0008818183770669226 - 0.656920390351561 d2: - - 0.12106188903957764 - -0.5283759505365493 - 0.002138368585748825 - -0.001813724693926351 - 0.634313128059728
mm = StereoCamera.from_yaml("camera.yml")
print(mm)
Camera 1 -------------------------- focalLength(x,y): 1061.4 1060.8 px principlePoint(x,y): 626.2 368.0 px distortionCoeffs: [[ 0.123 -0.545 0. 0.001 0.657]] Camera 2 -------------------------- focalLength(x,y): 1059.1 1058.6 px principlePoint(x,y): 629.4 368.4 px distortionCoeffs: [[ 0.121 -0.528 0.002 -0.002 0.634]] Extrinsic Camera Parameters ------- Translation between Left/Right Camera: [[-0.03 -0. -0. ]] Rotation between Left/Right Camera: [[ 1. 0.001 0. ] [-0.001 1. -0.002] [-0. 0.002 1. ]] Essential Matrix: [[-0. 0. -0. ] [-0. 0. 0.03] [ 0. -0.03 0. ]] Fundatmental Matrix: [[-0. 0. -0.021] [-0. 0. 2.542] [ 0.025 -2.54 1. ]]
print(mm.p1())
print(mm.p2())
[[1061.356 0. 626.194 0. ] [ 0. 1060.772 367.958 0. ] [ 0. 0. 1. 0. ]] [[1059.052 2.777 629.467 -31.595] [ -1.479 1059.324 366.221 -0.263] [ -0. 0.002 1. -0. ]]
Appendix A: Camera Intrinsic Calibration Code¶
from jtb import getCodeUrl, getCodeFile, getCodeImport
getCodeImport(Calibrate)
class Calibrate:
"""Calibrate an individual camera"""
def __init__(self, dictionary, board):
self.dictionary = dictionary
self.board = board
def calculateReprojectionError(self, imgpoints, objpoints, rvecs, tvecs, mtx, dist):
"""
imgpts: features found in image, (num_imgs, 2)
objpts: calibration known features in 3d, (num_imgs, 3)
"""
imgpoints = [c.reshape(-1,2) for c in imgpoints]
mean_error = 0
for i in range(len(objpoints)):
# print('img',imgpoints[i].shape)
# print('obj', objpoints[i].shape)
imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
imgpoints2 = imgpoints2.reshape(-1,2)
# if not all markers were found, then the norm below will fail
if len(imgpoints[i]) != len(imgpoints2):
continue
error = cv2.norm(imgpoints[i], imgpoints2, cv2.NORM_L2)/len(imgpoints2)
mean_error += error
# print( "total error: {}".format(mean_error/len(objpoints)) )
return mean_error/len(objpoints)
def calibrate(self, imgs, K=None):
calcorners = [] # 2d points in image
calids = [] # ids found in image
h,w = imgs[0].shape[:2]
# so we know a little bit about the camera, so
# start off the algorithm with a simple guess
f = max(h,w) # focal length is a function of image size in pixels
K = np.array([
[f,0,w/2],
[0,f,h/2],
[0.,0.,1.]
])
for im in imgs:
# make grayscale if it is not already
if len(im.shape) > 2:
gray = cv2.cvtColor(im, cv2.COLOR_BGR2GRAY)
else:
gray = im.copy()
corners, ids, rejectedImgPts = aruco.detectMarkers(gray, self.dictionary)
# if ids were found, then
if ids is not None and len(ids) > 0:
ret, chcorners, chids = aruco.interpolateCornersCharuco(
corners, ids, gray, self.board)
calcorners.append(chcorners)
calids.append(chids)
flags = 0
flags |= cv2.CALIB_USE_INTRINSIC_GUESS # make an inital guess at cameraMatrix (K)
# flags |= cv2.CALIB_FIX_PRINCIPAL_POINT # value? makes it worse
rms, cameraMatrix, distCoeffs, rvecs, tvecs = aruco.calibrateCameraCharuco(
calcorners, calids, self.board, (w,h), K, None, flags=flags)
cam_params = {
'marker_type': 'aruco',
'cameraMatrix': cameraMatrix,
'distCoeffs': distCoeffs,
'image_size': imgs[0].shape[:2],
# 'marker_size': (x,y),
# 'marker_scale:': sqr
'rms': rms
}
# objpts = [self.board.chessboardCorners.copy() for c in calcorners]
h, w = self.board.chessboardCorners.shape
objpts = [self.board.chessboardCorners.reshape((h,1,3)) for c in calcorners]
# imgpts = [c.reshape(-1,2) for c in calcorners]
imgpts = calcorners
# print('obj', len(objpts))
# print('imgpts', len(imgpts))
reproError = self.calculateReprojectionError(imgpts, objpts, rvecs, tvecs, cameraMatrix, distCoeffs)
return (rms, cameraMatrix, distCoeffs, rvecs, tvecs, objpts, imgpts)
Appendix B: Blurry¶
getCodeImport(blurry)
def blurry(image, threshold=100.0):
"""
Given an image and threshold, returns if image is blurry and its value
Args:
image: opencv grayscale image
threshold: blur threshold value, below this value an image is considered
to be blurry
Return:
blurry: True/False
value: numeric value of blurriness
Reference: https://pyimagesearch.com/2015/09/07/blur-detection-with-opencv/
"""
val = cv2.Laplacian(image, cv2.CV_64F).var()
val = int(val)
if val < threshold:
return True, val
return False, val