This notebook provides examples to go along with the textbook. I recommend having both windows open, side-by-side!
Click here for instructions on how to run the notebook on Deepnote and/or Google Colab.
from functools import partial
import numpy as np
from pydrake.all import (AddMultibodyPlantSceneGraph,
AddUnitQuaternionConstraintOnPlant, AutoDiffXd,
DiagramBuilder, ExtractGradient, ExtractValue,
InitializeAutoDiff, JacobianWrtVariable, JointIndex,
MathematicalProgram, MeshcatVisualizerCpp,
MultibodyPlant, OrientationConstraint, Parser,
PidController, PiecewisePolynomial,
PositionConstraint, RigidTransform, RotationMatrix,
Simulator, SnoptSolver, Solve, StartMeshcat, eq,
namedview, set_log_level)
from underactuated import FindResource, running_as_notebook
#set_log_level('off');
# Start the visualizer (run this cell only once, each instance consumes a port)
meshcat = StartMeshcat()
def set_home(plant, context):
hip_roll = .1;
hip_pitch = 1;
knee = 1.55;
plant.GetJointByName("front_right_hip_roll").set_angle(context, -hip_roll)
plant.GetJointByName("front_right_hip_pitch").set_angle(context, hip_pitch)
plant.GetJointByName("front_right_knee").set_angle(context, -knee)
plant.GetJointByName("front_left_hip_roll").set_angle(context, hip_roll)
plant.GetJointByName("front_left_hip_pitch").set_angle(context, hip_pitch)
plant.GetJointByName("front_left_knee").set_angle(context, -knee)
plant.GetJointByName("back_right_hip_roll").set_angle(context, -hip_roll)
plant.GetJointByName("back_right_hip_pitch").set_angle(context, -hip_pitch)
plant.GetJointByName("back_right_knee").set_angle(context, knee)
plant.GetJointByName("back_left_hip_roll").set_angle(context, hip_roll)
plant.GetJointByName("back_left_hip_pitch").set_angle(context, -hip_pitch)
plant.GetJointByName("back_left_knee").set_angle(context, knee)
plant.SetFreeBodyPose(context, plant.GetBodyByName("body"), RigidTransform([0, 0, 0.146]))
def run_pid_control():
builder = DiagramBuilder()
plant, scene_graph = AddMultibodyPlantSceneGraph(builder, 1e-3)
parser = Parser(plant)
parser.AddModelFromFile(FindResource('models/littledog/LittleDog.urdf'))
parser.AddModelFromFile(FindResource('models/littledog/ground.urdf'))
plant.Finalize()
# Add a PD Controller
kp = 1*np.ones(12)
ki = 0.0*np.ones(12)
kd = .1*np.ones(12)
# Select the joint states (and ignore the floating-base states)
S = np.zeros((24, 37))
j = 0
for i in range(plant.num_joints()):
joint = plant.get_joint(JointIndex(i))
if joint.num_positions() != 1:
continue
S[j, joint.position_start()] = 1
S[12+j, joint.velocity_start()] = 1
# use lower gain for the knee joints
if "knee" in joint.name():
kd[j] = 0.1
j = j+1
control = builder.AddSystem(PidController(
kp=kp, ki=ki, kd=kd,
state_projection=S,
output_projection=plant.MakeActuationMatrix()[6:,:].T))
builder.Connect(plant.get_state_output_port(), control.get_input_port_estimated_state())
builder.Connect(control.get_output_port(), plant.get_actuation_input_port())
visualizer = MeshcatVisualizerCpp.AddToBuilder(builder, scene_graph,
meshcat)
diagram = builder.Build()
simulator = Simulator(diagram)
context = simulator.get_mutable_context()
plant_context = plant.GetMyContextFromRoot(context)
set_home(plant, plant_context)
x0 = S @ plant.get_state_output_port().Eval(plant_context)
control.get_input_port_desired_state().FixValue(
control.GetMyContextFromRoot(context), x0)
simulator.set_target_realtime_rate(1.0 if running_as_notebook else 0)
visualizer.StartRecording()
simulator.AdvanceTo(3.0)
visualizer.PublishRecording()
run_pid_control()
Gait optimization¶
This is my reimplementation of some results I initially implemented for
Hongkai Dai, Andrés Valenzuela, and Russ Tedrake. Whole-body motion planning with centroidal dynamics and full kinematics. IEEE-RAS International Conference on Humanoid Robots, 2014. .pdf video
Note: In an old version of Drake, we wrapped the common functionality into ComDynamicsFullKinematicsPlanner. I reconstructed that functionality explicitly here. (But it would be fun to get it back into the new Drake).
It is still a work in progress (I haven't finished re-implementing all of the constraints, so the motions aren't dynamically feasible yet). I'll finish it soon!
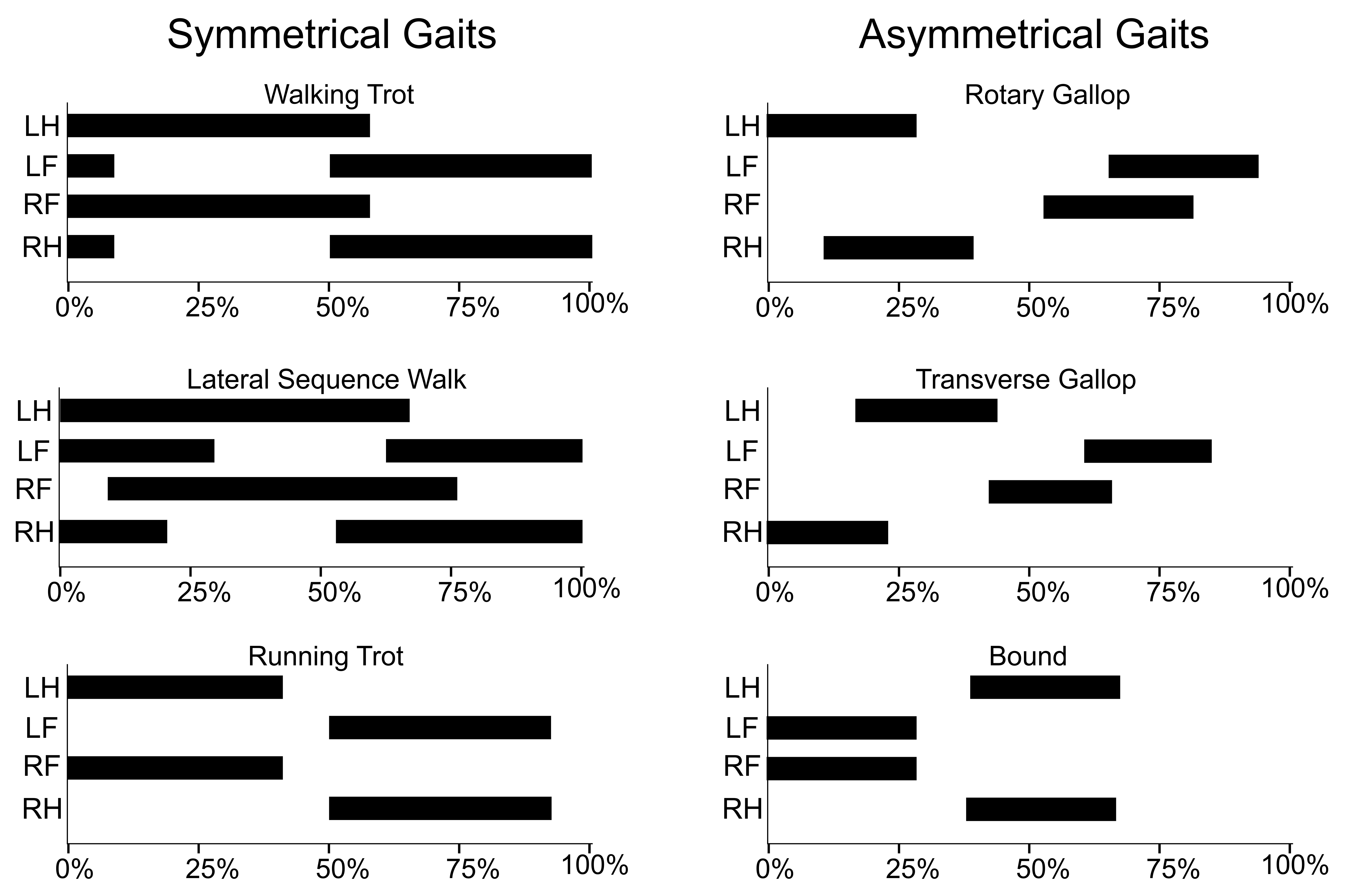
I used the following diagram to help think about the foot timings for the different gaits:
# Need this because a==b returns True even if a = AutoDiffXd(1, [1, 2]), b= AutoDiffXd(2, [3, 4])
# That's the behavior of AutoDiffXd in C++, also.
def autoDiffArrayEqual(a,b):
return np.array_equal(a, b) and np.array_equal(ExtractGradient(a), ExtractGradient(b))
# TODO: promote this to drake (and make a version with model_instance)
def MakeNamedViewPositions(mbp, view_name):
names = [None]*mbp.num_positions()
for ind in range(mbp.num_joints()):
joint = mbp.get_joint(JointIndex(ind))
# TODO: Handle planar joints, etc.
assert(joint.num_positions() == 1)
names[joint.position_start()] = joint.name()
for ind in mbp.GetFloatingBaseBodies():
body = mbp.get_body(ind)
start = body.floating_positions_start()
body_name = body.name()
names[start] = body_name+'_qw'
names[start+1] = body_name+'_qx'
names[start+2] = body_name+'_qy'
names[start+3] = body_name+'_qz'
names[start+4] = body_name+'_x'
names[start+5] = body_name+'_y'
names[start+6] = body_name+'_z'
return namedview(view_name, names)
def MakeNamedViewVelocities(mbp, view_name):
names = [None]*mbp.num_velocities()
for ind in range(mbp.num_joints()):
joint = mbp.get_joint(JointIndex(ind))
# TODO: Handle planar joints, etc.
assert(joint.num_velocities() == 1)
names[joint.velocity_start()] = joint.name()
for ind in mbp.GetFloatingBaseBodies():
body = mbp.get_body(ind)
start = body.floating_velocities_start() - mbp.num_positions()
body_name = body.name()
names[start] = body_name+'_wx'
names[start+1] = body_name+'_wy'
names[start+2] = body_name+'_wz'
names[start+3] = body_name+'_vx'
names[start+4] = body_name+'_vy'
names[start+5] = body_name+'_vz'
return namedview(view_name, names)
def gait_optimization(gait = 'walking_trot'):
builder = DiagramBuilder()
plant, scene_graph = AddMultibodyPlantSceneGraph(builder, 1e-3)
parser = Parser(plant)
littledog = parser.AddModelFromFile(FindResource('models/littledog/LittleDog.urdf'))
plant.Finalize()
visualizer = MeshcatVisualizerCpp.AddToBuilder(builder, scene_graph,
meshcat)
diagram = builder.Build()
context = diagram.CreateDefaultContext()
plant_context = plant.GetMyContextFromRoot(context)
set_home(plant, plant_context)
diagram.Publish(context)
q0 = plant.GetPositions(plant_context)
body_frame = plant.GetFrameByName("body")
PositionView = MakeNamedViewPositions(plant, "Positions")
VelocityView = MakeNamedViewVelocities(plant, "Velocities")
mu = 1 # rubber on rubber
total_mass = sum(plant.get_body(index).get_mass(context) for index in plant.GetBodyIndices(littledog))
gravity = plant.gravity_field().gravity_vector()
nq = 12
foot_frame = [
plant.GetFrameByName('front_left_foot_center'),
plant.GetFrameByName('front_right_foot_center'),
plant.GetFrameByName('back_left_foot_center'),
plant.GetFrameByName('back_right_foot_center')]
# setup gait
is_laterally_symmetric = False
check_self_collision = False
if gait == 'running_trot':
N = 21
in_stance = np.zeros((4, N))
in_stance[1, 3:17] = 1
in_stance[2, 3:17] = 1
speed = 0.9
stride_length = .55
is_laterally_symmetric = True
elif gait == 'walking_trot':
N = 21
in_stance = np.zeros((4, N))
in_stance[0, :11] = 1
in_stance[1, 8:N] = 1
in_stance[2, 8:N] = 1
in_stance[3, :11] = 1
speed = 0.4
stride_length = .25
is_laterally_symmetric = True
elif gait == 'rotary_gallop':
N = 41
in_stance = np.zeros((4, N))
in_stance[0, 7:19] = 1
in_stance[1, 3:15] = 1
in_stance[2, 24:35] = 1
in_stance[3, 26:38] = 1
speed = 1
stride_length = .65
check_self_collision = True
elif gait == 'bound':
N = 41
in_stance = np.zeros((4, N))
in_stance[0, 6:18] = 1
in_stance[1, 6:18] = 1
in_stance[2, 21:32] = 1
in_stance[3, 21:32] = 1
speed = 1.2
stride_length = .55
check_self_collision = True
else:
raise RuntimeError('Unknown gait.')
T = stride_length / speed
if is_laterally_symmetric:
T = T / 2.0
prog = MathematicalProgram()
# Time steps
h = prog.NewContinuousVariables(N-1, "h")
prog.AddBoundingBoxConstraint(0.5*T/N, 2.0*T/N, h)
prog.AddLinearConstraint(sum(h) >= .9*T)
prog.AddLinearConstraint(sum(h) <= 1.1*T)
# Create one context per timestep (to maximize cache hits)
context = [plant.CreateDefaultContext() for i in range(N)]
# We could get rid of this by implementing a few more Jacobians in MultibodyPlant:
ad_plant = plant.ToAutoDiffXd()
# Joint positions and velocities
nq = plant.num_positions()
nv = plant.num_velocities()
q = prog.NewContinuousVariables(nq, N, "q")
v = prog.NewContinuousVariables(nv, N, "v")
q_view = PositionView(q)
v_view = VelocityView(v)
q0_view = PositionView(q0)
# Joint costs
q_cost = PositionView([1]*nq)
v_cost = VelocityView([1]*nv)
q_cost.body_x = 0
q_cost.body_y = 0
q_cost.body_qx = 0
q_cost.body_qy = 0
q_cost.body_qz = 0
q_cost.body_qw = 0
q_cost.front_left_hip_roll = 5
q_cost.front_right_hip_roll = 5
q_cost.back_left_hip_roll = 5
q_cost.back_right_hip_roll = 5
v_cost.body_vx = 0
v_cost.body_wx = 0
v_cost.body_wy = 0
v_cost.body_wz = 0
for n in range(N):
# Joint limits
prog.AddBoundingBoxConstraint(plant.GetPositionLowerLimits(), plant.GetPositionUpperLimits(), q[:,n])
# Joint velocity limits
prog.AddBoundingBoxConstraint(plant.GetVelocityLowerLimits(), plant.GetVelocityUpperLimits(), v[:,n])
# Unit quaternions
AddUnitQuaternionConstraintOnPlant(plant, q[:,n], prog)
# Body orientation
prog.AddConstraint(OrientationConstraint(plant,
body_frame, RotationMatrix(),
plant.world_frame(), RotationMatrix(),
0.1, context[n]), q[:,n])
# Initial guess for all joint angles is the home position
prog.SetInitialGuess(q[:,n], q0) # Solvers get stuck if the quaternion is initialized with all zeros.
# Running costs:
prog.AddQuadraticErrorCost(np.diag(q_cost), q0, q[:,n])
prog.AddQuadraticErrorCost(np.diag(v_cost), [0]*nv, v[:,n])
# Make a new autodiff context for this constraint (to maximize cache hits)
ad_velocity_dynamics_context = [ad_plant.CreateDefaultContext() for i in range(N)]
def velocity_dynamics_constraint(vars, context_index):
h, q, v, qn = np.split(vars, [1, 1+nq, 1+nq+nv])
if isinstance(vars[0], AutoDiffXd):
if not autoDiffArrayEqual(q, ad_plant.GetPositions(ad_velocity_dynamics_context[context_index])):
ad_plant.SetPositions(ad_velocity_dynamics_context[context_index], q)
v_from_qdot = ad_plant.MapQDotToVelocity(ad_velocity_dynamics_context[context_index], (qn - q)/h)
else:
if not np.array_equal(q, plant.GetPositions(context[context_index])):
plant.SetPositions(context[context_index], q)
v_from_qdot = plant.MapQDotToVelocity(context[context_index], (qn - q)/h)
return v - v_from_qdot
for n in range(N-1):
prog.AddConstraint(
partial(velocity_dynamics_constraint, context_index=n),
lb=[0]*nv, ub=[0]*nv,
vars=np.concatenate(([h[n]], q[:,n], v[:,n], q[:,n+1])))
# Contact forces
contact_force = [prog.NewContinuousVariables(3, N-1, f"foot{foot}_contact_force") for foot in range(4)]
for n in range(N-1):
for foot in range(4):
# Linear friction cone
prog.AddLinearConstraint(
contact_force[foot][0, n] <= mu * contact_force[foot][2, n])
prog.AddLinearConstraint(
-contact_force[foot][0, n] <= mu * contact_force[foot][2, n])
prog.AddLinearConstraint(
contact_force[foot][1, n] <= mu * contact_force[foot][2, n])
prog.AddLinearConstraint(
-contact_force[foot][1, n] <= mu * contact_force[foot][2, n])
# normal force >=0, normal_force == 0 if not in_stance
prog.AddBoundingBoxConstraint(
0, in_stance[foot, n] * 4 * 9.81 * total_mass,
contact_force[foot][2, n])
# Center of mass variables and constraints
com = prog.NewContinuousVariables(3, N, "com")
comdot = prog.NewContinuousVariables(3, N, "comdot")
comddot = prog.NewContinuousVariables(3, N-1, "comddot")
# Initial CoM x,y position == 0
prog.AddBoundingBoxConstraint(0, 0, com[:2,0])
# Initial CoM z vel == 0
prog.AddBoundingBoxConstraint(0, 0, comdot[2,0])
# CoM height
prog.AddBoundingBoxConstraint(.125, np.inf, com[2,:])
# CoM x velocity >= 0
prog.AddBoundingBoxConstraint(0, np.inf, comdot[0,:])
# CoM final x position
if is_laterally_symmetric:
prog.AddBoundingBoxConstraint(stride_length/2.0, stride_length/2.0, com[0,-1])
else:
prog.AddBoundingBoxConstraint(stride_length, stride_length, com[0,-1])
# CoM dynamics
for n in range(N-1):
# Note: The original matlab implementation used backwards Euler (here and throughout),
# which is a little more consistent with the LCP contact models.
prog.AddConstraint(eq(com[:, n+1], com[:,n] + h[n]*comdot[:,n]))
prog.AddConstraint(eq(comdot[:, n+1], comdot[:,n] + h[n]*comddot[:,n]))
prog.AddConstraint(eq(total_mass*comddot[:,n], sum(contact_force[i][:,n] for i in range(4)) + total_mass*gravity))
# Angular momentum (about the center of mass)
H = prog.NewContinuousVariables(3, N, "H")
Hdot = prog.NewContinuousVariables(3, N-1, "Hdot")
prog.SetInitialGuess(H, np.zeros((3, N)))
prog.SetInitialGuess(Hdot, np.zeros((3,N-1)))
# Hdot = sum_i cross(p_FootiW-com, contact_force_i)
def angular_momentum_constraint(vars, context_index):
q, com, Hdot, contact_force = np.split(vars, [nq, nq+3, nq+6])
contact_force = contact_force.reshape(3, 4, order='F')
if isinstance(vars[0], AutoDiffXd):
q = ExtractValue(q)
if not np.array_equal(q, plant.GetPositions(
context[context_index])):
plant.SetPositions(context[context_index], q)
torque = np.zeros(3)
for i in range(4):
p_WF = plant.CalcPointsPositions(context[context_index], foot_frame[i], [0,0,0], plant.world_frame())
Jq_WF = plant.CalcJacobianTranslationalVelocity(
context[context_index], JacobianWrtVariable.kQDot,
foot_frame[i], [0, 0, 0], plant.world_frame(), plant.world_frame())
ad_p_WF = InitializeAutoDiff(p_WF, np.hstack((Jq_WF, np.zeros((3, 18)))))
torque = torque + np.cross(ad_p_WF.reshape(3) - com, contact_force[:,i])
else:
if not np.array_equal(q, plant.GetPositions(context[context_index])):
plant.SetPositions(context[context_index], q)
torque = np.zeros(3)
for i in range(4):
p_WF = plant.CalcPointsPositions(context[context_index], foot_frame[i], [0,0,0], plant.world_frame())
torque += np.cross(p_WF.reshape(3) - com, contact_force[:,i])
return Hdot - torque
for n in range(N-1):
prog.AddConstraint(eq(H[:,n+1], H[:,n] + h[n]*Hdot[:,n]))
Fn = np.concatenate([contact_force[i][:,n] for i in range(4)])
prog.AddConstraint(partial(angular_momentum_constraint, context_index=n), lb=np.zeros(3), ub=np.zeros(3),
vars=np.concatenate((q[:,n], com[:,n], Hdot[:,n], Fn)))
# com == CenterOfMass(q), H = SpatialMomentumInWorldAboutPoint(q, v, com)
# Make a new autodiff context for this constraint (to maximize cache hits)
com_constraint_context = [ad_plant.CreateDefaultContext() for i in range(N)]
def com_constraint(vars, context_index):
qv, com, H = np.split(vars, [nq+nv, nq+nv+3])
if isinstance(vars[0], AutoDiffXd):
if not autoDiffArrayEqual(qv, ad_plant.GetPositionsAndVelocities(com_constraint_context[context_index])):
ad_plant.SetPositionsAndVelocities(com_constraint_context[context_index], qv)
com_q = ad_plant.CalcCenterOfMassPositionInWorld(com_constraint_context[context_index])
H_qv = ad_plant.CalcSpatialMomentumInWorldAboutPoint(com_constraint_context[context_index], com).rotational()
else:
if not np.array_equal(qv, plant.GetPositionsAndVelocities(context[context_index])):
plant.SetPositionsAndVelocities(context[context_index], qv)
com_q = plant.CalcCenterOfMassPositionInWorld(context[context_index])
H_qv = plant.CalcSpatialMomentumInWorldAboutPoint(context[context_index], com).rotational()
return np.concatenate((com_q - com, H_qv - H))
for n in range(N):
prog.AddConstraint(partial(com_constraint, context_index=n),
lb=np.zeros(6), ub=np.zeros(6), vars=np.concatenate((q[:,n], v[:,n], com[:,n], H[:,n])))
# TODO: Add collision constraints
# Kinematic constraints
def fixed_position_constraint(vars, context_index, frame):
q, qn = np.split(vars, [nq])
if not np.array_equal(q, plant.GetPositions(context[context_index])):
plant.SetPositions(context[context_index], q)
if not np.array_equal(qn, plant.GetPositions(context[context_index+1])):
plant.SetPositions(context[context_index+1], qn)
p_WF = plant.CalcPointsPositions(context[context_index], frame, [0,0,0], plant.world_frame())
p_WF_n = plant.CalcPointsPositions(context[context_index+1], frame, [0,0,0], plant.world_frame())
if isinstance(vars[0], AutoDiffXd):
J_WF = plant.CalcJacobianTranslationalVelocity(context[context_index], JacobianWrtVariable.kQDot,
frame, [0, 0, 0], plant.world_frame(), plant.world_frame())
J_WF_n = plant.CalcJacobianTranslationalVelocity(context[context_index+1], JacobianWrtVariable.kQDot,
frame, [0, 0, 0], plant.world_frame(), plant.world_frame())
return InitializeAutoDiff(
p_WF_n - p_WF, J_WF_n @ ExtractGradient(qn) - J_WF @ ExtractGradient(q))
else:
return p_WF_n - p_WF
for i in range(4):
for n in range(N):
if in_stance[i, n]:
# foot should be on the ground (world position z=0)
prog.AddConstraint(PositionConstraint(
plant, plant.world_frame(), [-np.inf,-np.inf,0], [np.inf,np.inf,0],
foot_frame[i], [0,0,0], context[n]), q[:,n])
if n > 0 and in_stance[i, n-1]:
# feet should not move during stance.
prog.AddConstraint(partial(fixed_position_constraint, context_index=n-1, frame=foot_frame[i]),
lb=np.zeros(3), ub=np.zeros(3), vars=np.concatenate((q[:,n-1], q[:,n])))
else:
min_clearance = 0.01
prog.AddConstraint(PositionConstraint(plant, plant.world_frame(), [-np.inf,-np.inf,min_clearance], [np.inf,np.inf,np.inf],foot_frame[i],[0,0,0],context[n]), q[:,n])
# Periodicity constraints
if is_laterally_symmetric:
# Joints
def AddAntiSymmetricPair(a, b):
prog.AddLinearEqualityConstraint(a[0] == -b[-1])
prog.AddLinearEqualityConstraint(a[-1] == -b[0])
def AddSymmetricPair(a, b):
prog.AddLinearEqualityConstraint(a[0] == b[-1])
prog.AddLinearEqualityConstraint(a[-1] == b[0])
AddAntiSymmetricPair(q_view.front_left_hip_roll,
q_view.front_right_hip_roll)
AddSymmetricPair(q_view.front_left_hip_pitch,
q_view.front_right_hip_pitch)
AddSymmetricPair(q_view.front_left_knee, q_view.front_right_knee)
AddAntiSymmetricPair(q_view.back_left_hip_roll,
q_view.back_right_hip_roll)
AddSymmetricPair(q_view.back_left_hip_pitch,
q_view.back_right_hip_pitch)
AddSymmetricPair(q_view.back_left_knee, q_view.back_right_knee)
prog.AddLinearEqualityConstraint(q_view.body_y[0] == -q_view.body_y[-1])
prog.AddLinearEqualityConstraint(q_view.body_z[0] == q_view.body_z[-1])
# Body orientation must be in the xz plane:
prog.AddBoundingBoxConstraint(0, 0, q_view.body_qx[[0,-1]])
prog.AddBoundingBoxConstraint(0, 0, q_view.body_qz[[0,-1]])
# Floating base velocity
prog.AddLinearEqualityConstraint(v_view.body_vx[0] == v_view.body_vx[-1])
prog.AddLinearEqualityConstraint(v_view.body_vy[0] == -v_view.body_vy[-1])
prog.AddLinearEqualityConstraint(v_view.body_vz[0] == v_view.body_vz[-1])
# CoM velocity
prog.AddLinearEqualityConstraint(comdot[0,0] == comdot[0,-1])
prog.AddLinearEqualityConstraint(comdot[1,0] == -comdot[1,-1])
prog.AddLinearEqualityConstraint(comdot[2,0] == comdot[2,-1])
else:
# Everything except body_x is periodic
q_selector = PositionView([True]*nq)
q_selector.body_x = False
prog.AddLinearConstraint(eq(q[q_selector,0], q[q_selector,-1]))
prog.AddLinearConstraint(eq(v[:,0], v[:,-1]))
# TODO: Set solver parameters (mostly to make the worst case solve times less bad)
snopt = SnoptSolver().solver_id()
prog.SetSolverOption(snopt, 'Iterations Limits', 1e5 if running_as_notebook else 1)
prog.SetSolverOption(snopt, 'Major Iterations Limit', 200 if running_as_notebook else 1)
prog.SetSolverOption(snopt, 'Major Feasibility Tolerance', 5e-6)
prog.SetSolverOption(snopt, 'Major Optimality Tolerance', 1e-4)
prog.SetSolverOption(snopt, 'Superbasics limit', 2000)
prog.SetSolverOption(snopt, 'Linesearch tolerance', 0.9)
#prog.SetSolverOption(snopt, 'Print file', 'snopt.out')
# TODO a few more costs/constraints from
# from https://github.com/RobotLocomotion/LittleDog/blob/master/gaitOptimization.m
result = Solve(prog)
print(result.get_solver_id().name())
#print(result.is_success()) # We expect this to be false if iterations are limited.
def HalfStrideToFullStride(a):
b = PositionView(np.copy(a))
b.body_y = -a.body_y
# Mirror quaternion so that roll=-roll, yaw=-yaw
b.body_qx = -a.body_qx
b.body_qz = -a.body_qz
b.front_left_hip_roll = -a.front_right_hip_roll
b.front_right_hip_roll = -a.front_left_hip_roll
b.back_left_hip_roll = -a.back_right_hip_roll
b.back_right_hip_roll = -a.back_left_hip_roll
b.front_left_hip_pitch = a.front_right_hip_pitch
b.front_right_hip_pitch = a.front_left_hip_pitch
b.back_left_hip_pitch = a.back_right_hip_pitch
b.back_right_hip_pitch = a.back_left_hip_pitch
b.front_left_knee = a.front_right_knee
b.front_right_knee = a.front_left_knee
b.back_left_knee = a.back_right_knee
b.back_right_knee = a.back_left_knee
return b
# Animate trajectory
context = diagram.CreateDefaultContext()
plant_context = plant.GetMyContextFromRoot(context)
t_sol = np.cumsum(np.concatenate(([0],result.GetSolution(h))))
q_sol = PiecewisePolynomial.FirstOrderHold(t_sol, result.GetSolution(q))
visualizer.StartRecording()
num_strides = 4
t0 = t_sol[0]
tf = t_sol[-1]
T = tf*num_strides*(2.0 if is_laterally_symmetric else 1.0)
for t in np.hstack((np.arange(t0, T, 1.0/32.0), T)):
context.SetTime(t)
stride = (t - t0) // (tf - t0)
ts = (t - t0) % (tf - t0)
qt = PositionView(q_sol.value(ts))
if is_laterally_symmetric:
if stride % 2 == 1:
qt = HalfStrideToFullStride(qt)
qt.body_x += stride_length/2.0
stride = stride // 2
qt.body_x += stride*stride_length
plant.SetPositions(plant_context, qt[:])
diagram.Publish(context)
visualizer.StopRecording()
visualizer.PublishRecording()
# Try them all! The last two could use a little tuning.
gait_optimization('walking_trot')
#gait_optimization('running_trot')
#gait_optimization('rotary_gallop')
#gait_optimization('bound')