Factor Graphs¶
- [1] Consider the following state-space model:
where $k=1,2,\ldots,n$ is the time step counter; $z_k$ is an unobserved state sequence; $x_k$ is an observed sequence; $w_k \sim \mathcal{N}(0,\Sigma_w)$ and $v_k \sim \mathcal{N}(0,\Sigma_v)$ are (unobserved) state and observation noise sequences respectively; $z_0 \sim \mathcal{N}(0,\Sigma_0)$ is the initial state and $A$, $C$, $\Sigma_v$,$\Sigma_w$ and $\Sigma_0$ are known parameters. The Forney-style factor graph (FFG) for one time step is depicted here:
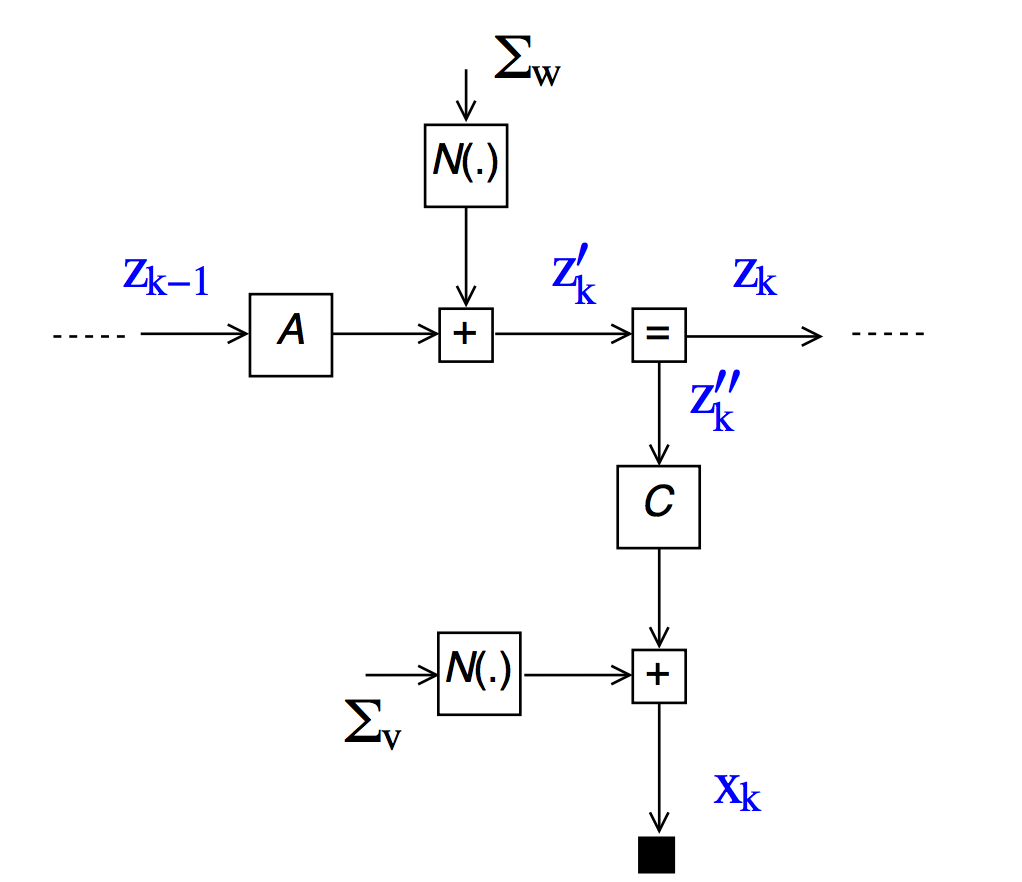
(a) Rewrite the state-space equations as a set of conditional probability distributions.
$$\begin{align*}
p(z_k|z_{k-1},A,\Sigma_w) &= \ldots \\
p(x_k|z_k,C,\Sigma_v) &= \ldots \\
p(z_0|\Sigma_0) &= \ldots
\end{align*}$$
This is a linear system with only Gaussian source signals ($w_k$ and $v_k$), hence the distributions for $z_k$ and $x_k$ will also be Gaussian. As a result, we only need to compute the mean and covariance matrix. We begin with the mean for $p(z_k|z_{k-1},A,\Sigma_w)$:
$$\begin{align*} E[z_k|z_{k-1},A,\Sigma_w] &= E[A z_{k-1} + w_k|z_{k-1},A,\Sigma_w] \\ &= E[A z_{k-1}|z_{k-1},A] + E[w_k|\Sigma_w] \\ &= A z_{k-1} + 0 \end{align*}$$
And now the variance:
$$\begin{align*} V[z_k|z_{k-1},A,\Sigma_w] &= E[(z_k - E[z_k])(z_k-E[z_k])^T \,|\,z_{k-1},A,\Sigma_w ] \\ &= E[(\overbrace{A z_{k-1} + w_k}^{z_k} - \overbrace{A z_{k-1}}^{E[z_k]})(A z_{k-1} + w_k-A z_{k-1})^T|z_{k-1},A,\Sigma_w] \\ &= E[w_k w_k^T|\Sigma_w] \\ &= \Sigma_w \end{align*}$$
You can execute similar computations for the other distributions, leading to
$$\begin{align*} p(z_k|z_{k-1},A,\Sigma_w) &= \mathcal{N}(z_k|A z_{k-1},\Sigma_w) \\ p(x_k|z_k,C,\Sigma_v) &= \mathcal{N}(x_k|C z_k,\Sigma_v) \\ p(z_0|\Sigma_0) &= \mathcal{N}(z_0|0,\Sigma_0) \end{align*}$$
(b) Define $z^n \triangleq (z_0,z_1,\ldots,z_n)$, $x^n \triangleq (x_1,\ldots,x_n)$ and $\theta=\{A,C,\Sigma_w,\Sigma_v\}$. Now write out the generative model $p(x^n,z^n|\theta)$ as a product of factors.
$$\begin{align*}
p(x^n,z^n|\theta) &= p(z_0|\Sigma_0) \prod_{k=1}^n p(x_k|z_k,C,\Sigma_v) \,p(z_k|z_{k-1},A,\Sigma_w) \\
&= \mathcal{N}(z_0|0,\Sigma_0) \prod_{k=1}^n \mathcal{N}(x_k|C z_k,\Sigma_v) \,\mathcal{N}(z_k|A z_{k-1},\Sigma_w)
\end{align*}$$
(c) We are interested in estimating $z_k$ from a given estimate for $z_{k-1}$ and the current observation $x_k$, i.e., we are interested in computing $p(z_k|z_{k-1},x_k,\theta)$. Can $p(z_k|z_{k-1},x_k,\theta)$ be expressed as a Gaussian distribution? Explain why or why not in one sentence.
Yes, since the generative model $p(x^n,z^n|\theta)$ is (one big) Gaussian.
(d) Copy the graph onto your exam paper and draw the message passing schedule for computing $p(z_k|z_{k-1},x_k,\theta)$ by drawing arrows in the factor graph. Indicate the order of the messages by assigning numbers to the arrows.
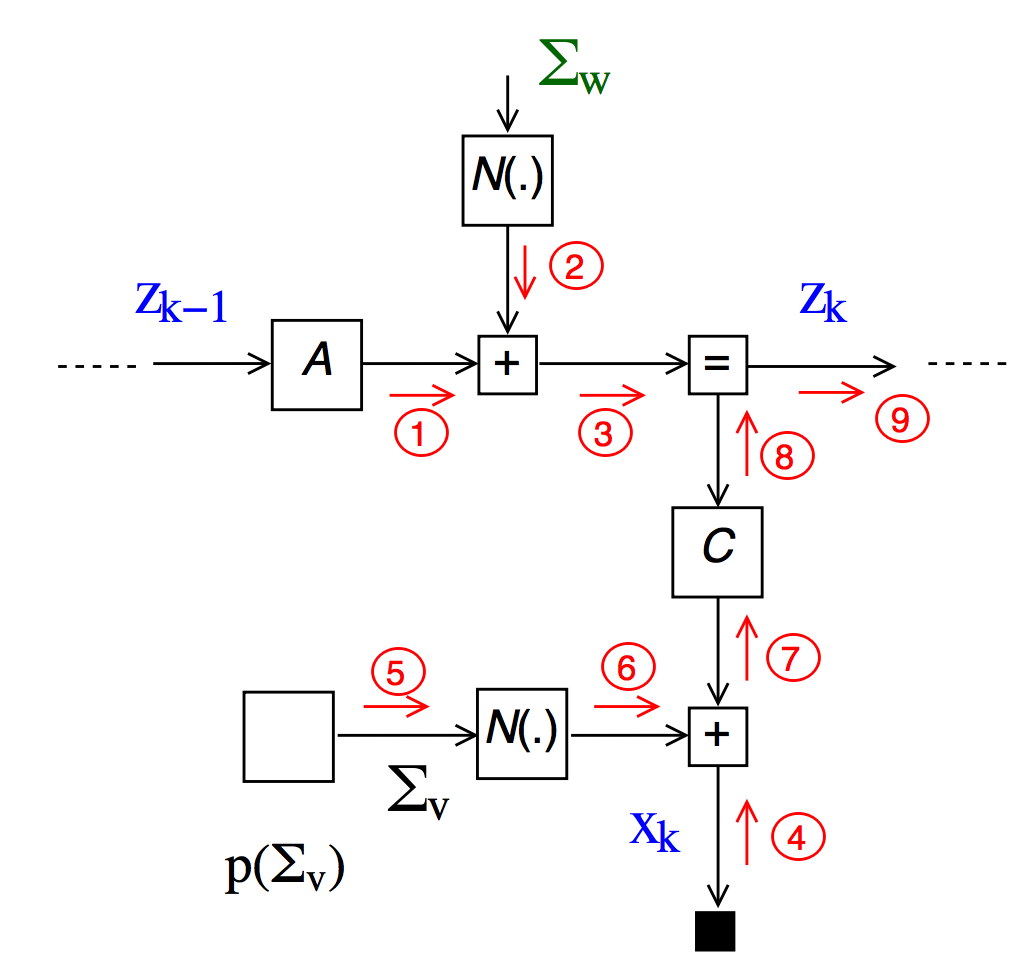
Some permutations of this order are also possible. The most important thing here is that you recognize the tree with $Z_k$ as a root of the tree and pass messages from the terminals (e.g., $Z_{k-1}$, $X_k$, etc.) towards the root.
(e) Now assume that our belief about parameter $\Sigma_v$ is instead given by a distribution $p(\Sigma_v)$ (rather than a known value). Adapt the factor graph drawing of the previous answer to reflects our belief about $\Sigma_v$.
See drawing in previous answer.
- [2] Consider an addition node $$f_+(x,y,z) = \delta(z-x-y)$$
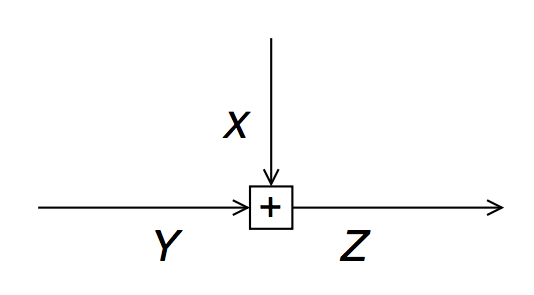
(a) Derive an expression for the outgoing message $\overrightarrow{\mu}_{Z}(z)$ in terms of the incoming messages $\overrightarrow{\mu}_{X}(\cdot)$ and $\overrightarrow{\mu}_{Y}(\cdot)$.
$$\begin{align*} \overrightarrow{\mu}_{Z}(z) &= \iint \overrightarrow{\mu}_{X}(x) \overrightarrow{\mu}_{Y}(y) \,\delta(z-x-y) \,\mathrm{d}x \mathrm{d}y \\ &= \int \overrightarrow{\mu}_{X}(x) \overrightarrow{\mu}_{Y}(z-x) \,\mathrm{d}x \,, \end{align*}$$We use the sum-product rule to compute
i.e., $\overrightarrow{\mu}_{Z}$ is the convolution of the messages $\overrightarrow{\mu}_{X}$ and $\overrightarrow{\mu}_{Y}$.
(b) Now assume that both incoming messages are Gaussian, namely $\overrightarrow{\mu}_{X}(x) \sim \mathcal{N}(\overrightarrow{m}_X,\overrightarrow{V}_X)$ and $\overrightarrow{\mu}_{Y}(y) \sim \mathcal{N}(\overrightarrow{m}_Y,\overrightarrow{V}_Y)$. Evaluate the outgoing message $\overrightarrow{\mu}_{Z}(z)$. You will need the multiplication rule for Gaussians.
$$\begin{align*} \overrightarrow{m}_Z &= \overrightarrow{m}_X + \overrightarrow{m}_Y \\ \overrightarrow{V}_z &= \overrightarrow{V}_X + \overrightarrow{V}_Y \,. \end{align*}$$For Gaussian incoming messages, these update rules evaluate to $\overrightarrow{\mu}_{Z}(z) \sim \mathcal{N}(\overrightarrow{m}_Z,\overrightarrow{V}_Z)$ with
- (c) For the same summation node, work out the SP update rule for the backward message $\overleftarrow{\mu}_{X}(x)$ as a function of $\overrightarrow{\mu}_{Y}(y)$ and $\overleftarrow{\mu}_{Z}(z)$. And further refine the answer for Gaussian messages.
$$\begin{align*} \overleftarrow{\mu}_{X}(x) &= \int \mathcal{N}(z-x | m_y,V_y) \mathcal{N}(z | m_z,V_z)\,\mathrm{d}z \qquad &&\text{(a)}\\ &= \int \mathcal{N}(z | x+ m_y,V_y) \mathcal{N}(z | m_z,V_z)\,\mathrm{d}z \qquad &&\text{(b)}\\ &= \int \mathcal{N}(x+m_y | m_z,V_y+V_z) \mathcal{N}(z | \cdot,\cdot)\,\mathrm{d}z \qquad &&\text{(c)} \\ &= \mathcal{N}(x | m_z-m_y, V_y+V_z) \qquad &&\text{(d)} \end{align*}$$and now further with Gaussian messages,
$$ \mathcal{N}(z|m_a,V_a) \mathcal{N}(z|m_b,V_b) = \mathcal{N}(m_a|m_b,V_a+V_b) \mathcal{N}(z|\cdot,\cdot)$$where going from (b) to (c) we used the formula for multiplication of Gaussians:
where the dots stand for expressions that are not relevant here, since the Gaussian for $z$ is marginalized away.