PyTorch¶
Environment setup¶
In [1]:
import platform
print(f"Python version: {platform.python_version()}")
assert platform.python_version_tuple() >= ("3", "6")
import numpy as np
import matplotlib
import matplotlib.pyplot as plt
import seaborn as sns
Python version: 3.7.5
In [2]:
# Setup plots
%matplotlib inline
plt.rcParams["figure.figsize"] = 10, 8
%config InlineBackend.figure_format = 'retina'
sns.set()
%load_ext tensorboard
In [3]:
import sklearn
print(f"scikit-learn version: {sklearn.__version__}")
from sklearn.datasets import make_moons
import torch
print(f"PyTorch version: {torch.__version__}")
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
from torch.utils.tensorboard import SummaryWriter
scikit-learn version: 0.22.1 PyTorch version: 1.3.1
In [4]:
def plot_planar_data(X, y):
"""Plot some 2D data"""
plt.figure()
plt.plot(X[y == 0, 0], X[y == 0, 1], 'or', alpha=0.5, label=0)
plt.plot(X[y == 1, 0], X[y == 1, 1], 'ob', alpha=0.5, label=1)
plt.legend()
Tensor API¶
Tensor creation¶
In [5]:
# Create 1D tensor with predefined values
t = torch.tensor([5.5, 3])
print(t)
print(t.shape)
tensor([5.5000, 3.0000]) torch.Size([2])
In [6]:
# Create 2D tensor filled with random numbers from a uniform distribution
x = torch.rand(5, 3)
print(x)
print(x.shape)
tensor([[0.3746, 0.1669, 0.0174],
[0.9889, 0.9538, 0.0463],
[0.1561, 0.4398, 0.5971],
[0.9370, 0.8256, 0.6580],
[0.2451, 0.8639, 0.5963]])
torch.Size([5, 3])
Operations¶
In [7]:
# Addition operator
y = x + 2
print(y)
tensor([[2.3746, 2.1669, 2.0174],
[2.9889, 2.9538, 2.0463],
[2.1561, 2.4398, 2.5971],
[2.9370, 2.8256, 2.6580],
[2.2451, 2.8639, 2.5963]])
In [8]:
# Addition method
y = torch.add(x, 2)
print(y)
tensor([[2.3746, 2.1669, 2.0174],
[2.9889, 2.9538, 2.0463],
[2.1561, 2.4398, 2.5971],
[2.9370, 2.8256, 2.6580],
[2.2451, 2.8639, 2.5963]])
In [9]:
y = torch.zeros(5, 3)
# In-place addition: tensor is mutated
y.add_(x)
y.add_(2)
print(y)
tensor([[2.3746, 2.1669, 2.0174],
[2.9889, 2.9538, 2.0463],
[2.1561, 2.4398, 2.5971],
[2.9370, 2.8256, 2.6580],
[2.2451, 2.8639, 2.5963]])
Indexing¶
In [10]:
print(x)
# Print second column of tensor
print(x[:, 1])
tensor([[0.3746, 0.1669, 0.0174],
[0.9889, 0.9538, 0.0463],
[0.1561, 0.4398, 0.5971],
[0.9370, 0.8256, 0.6580],
[0.2451, 0.8639, 0.5963]])
tensor([0.1669, 0.9538, 0.4398, 0.8256, 0.8639])
Reshaping with view()¶
PyTorch allows a tensor to be a view of an existing tensor. For memory efficiency reasons, view tensors share the same underlying data with their base tensor.
In [11]:
# Reshape into a (15,) vector
x.view(15)
Out[11]:
tensor([0.3746, 0.1669, 0.0174, 0.9889, 0.9538, 0.0463, 0.1561, 0.4398, 0.5971,
0.9370, 0.8256, 0.6580, 0.2451, 0.8639, 0.5963])
In [12]:
# The dimension identified by -1 is inferred from other dimensions
print(x.view(-1, 5)) # Shape: (3,5)
print(x.view(5, -1)) # Shape: (5, 3)
print(x.view(-1,)) # Shape: (15,)
# Error: a tensor of size 15 can't be reshaped into a (?, 4) tensor
# print(x.view(-1, 4))
tensor([[0.3746, 0.1669, 0.0174, 0.9889, 0.9538],
[0.0463, 0.1561, 0.4398, 0.5971, 0.9370],
[0.8256, 0.6580, 0.2451, 0.8639, 0.5963]])
tensor([[0.3746, 0.1669, 0.0174],
[0.9889, 0.9538, 0.0463],
[0.1561, 0.4398, 0.5971],
[0.9370, 0.8256, 0.6580],
[0.2451, 0.8639, 0.5963]])
tensor([0.3746, 0.1669, 0.0174, 0.9889, 0.9538, 0.0463, 0.1561, 0.4398, 0.5971,
0.9370, 0.8256, 0.6580, 0.2451, 0.8639, 0.5963])
Reshaping à la NumPy¶
In [13]:
# Reshape into a (3,5) tensor, creating a view if possible
x.reshape(3, 5)
Out[13]:
tensor([[0.3746, 0.1669, 0.0174, 0.9889, 0.9538],
[0.0463, 0.1561, 0.4398, 0.5971, 0.9370],
[0.8256, 0.6580, 0.2451, 0.8639, 0.5963]])
From NumPy to PyTorch¶
In [14]:
# Create a NumPy tensor
a = np.random.rand(2, 2)
# Convert it into a PyTorch tensor
b = torch.from_numpy(a)
print(b)
# a and b share memory
a *= 2
print(b)
b += 1
print(a)
tensor([[0.6285, 0.2705],
[0.8091, 0.1353]], dtype=torch.float64)
tensor([[1.2571, 0.5411],
[1.6182, 0.2706]], dtype=torch.float64)
[[2.25707965 1.54108591]
[2.61824455 1.27061508]]
From PyTorch to NumPy¶
In [15]:
# Create a PyTorch tensor
a = torch.rand(2,2)
# Convert it into a NumPy tensor
b = a.numpy()
print(b)
# a and b share memory
a *= 2
print(b)
b += 1
print(a)
[[0.05700839 0.8589342 ]
[0.8565902 0.6768685 ]]
[[0.11401677 1.7178684 ]
[1.7131804 1.353737 ]]
tensor([[1.1140, 2.7179],
[2.7132, 2.3537]])
GPU-based tensors¶
In [16]:
# Look for an available CUDA device
if torch.cuda.is_available():
device = torch.device("cuda")
# Move an existing tensor to GPU
x_gpu = x.to(device)
print(x_gpu)
# Directly create a tensor on GPU
t_gpu = torch.ones(3, 3, device=device)
print(t_gpu)
else:
print("No CUDA device available :(")
No CUDA device available :(
In [17]:
# Try to copy tensor to GPU, fall back on CPU instead
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
x_device = x.to(device)
print(x_device)
tensor([[0.3746, 0.1669, 0.0174],
[0.9889, 0.9538, 0.0463],
[0.1561, 0.4398, 0.5971],
[0.9370, 0.8256, 0.6580],
[0.2451, 0.8639, 0.5963]])
Neural networks API¶
Building models with PyTorch¶
The torch.nn package provides the basic building blocks for assembling models. Other packages like torch.optim and torchvision define training utilities and specialized tools.
PyTorch offers a great deal of flexibility for creating custom architectures and training loops, hence its popularity among researchers.
Example 1: training a dense network on planar data¶
In [21]:
# Generate moon-shaped, non-linearly separable data
x, y = make_moons(n_samples=1000, noise=0.10, random_state=0)
print(f'x: {x.shape}. y: {y.shape}')
plot_planar_data(x, y)
x: (1000, 2). y: (1000,)

In [22]:
# Create PyTorch tensors from Numpy data, with appropriate types
x_train = torch.from_numpy(x).float()
y_train = torch.from_numpy(y).long()
Model definition¶
In [23]:
# Use the nn package to define our model as a sequence of layers. nn.Sequential
# is a Module which contains other Modules, and applies them in sequence to
# produce its output. Each Linear Module computes output from input using a
# linear function, and holds internal Tensors for its weight and bias.
dense_model = nn.Sequential(
nn.Linear(in_features=2, out_features=3),
nn.Tanh(),
nn.Linear(in_features=3, out_features=2)
)
print(dense_model)
Sequential( (0): Linear(in_features=2, out_features=3, bias=True) (1): Tanh() (2): Linear(in_features=3, out_features=2, bias=True) )
In [24]:
# The nn package also contains definitions of popular loss functions; in this
# case we will use Cross Entropy as our loss function.
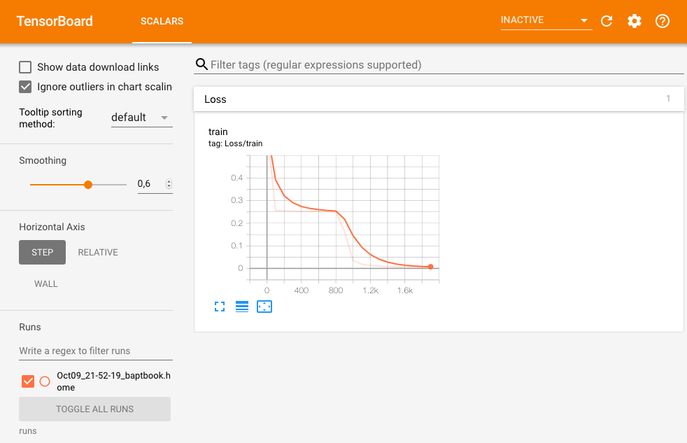
loss_fn = nn.CrossEntropyLoss()
# Used to enable training analysis through TensorBoard
# Writer will output to ./runs/ directory by default
writer = SummaryWriter()
Model training¶
In [25]:
learning_rate = 1.0
num_epochs = 2000
for epoch in range(num_epochs):
# Forward pass: compute model prediction
y_pred = dense_model(x_train)
# Compute and print loss
loss = loss_fn(y_pred, y_train)
if epoch % 100 == 0:
print(f"Epoch [{epoch+1:4}/{num_epochs}], loss: {loss:.6f}")
# Write epoch loss for TensorBoard
writer.add_scalar("Loss/train", loss.item(), epoch)
# Zero the gradients before running the backward pass
# Avoids accumulating gradients erroneously
dense_model.zero_grad()
# Backward pass: compute gradient of the loss w.r.t all the learnable parameters of the model
loss.backward()
# Update the weights using gradient descent
# no_grad() avoids tracking operations history here
with torch.no_grad():
for param in dense_model.parameters():
param -= learning_rate * param.grad
print(f"Training finished. Final loss: {loss:.6f}")
Epoch [ 1/2000], loss: 0.615728 Epoch [ 101/2000], loss: 0.255993 Epoch [ 201/2000], loss: 0.254656 Epoch [ 301/2000], loss: 0.253930 Epoch [ 401/2000], loss: 0.253383 Epoch [ 501/2000], loss: 0.252850 Epoch [ 601/2000], loss: 0.252219 Epoch [ 701/2000], loss: 0.251364 Epoch [ 801/2000], loss: 0.250020 Epoch [ 901/2000], loss: 0.165510 Epoch [1001/2000], loss: 0.034935 Epoch [1101/2000], loss: 0.018792 Epoch [1201/2000], loss: 0.013152 Epoch [1301/2000], loss: 0.010341 Epoch [1401/2000], loss: 0.008661 Epoch [1501/2000], loss: 0.007542 Epoch [1601/2000], loss: 0.006741 Epoch [1701/2000], loss: 0.006137 Epoch [1801/2000], loss: 0.005665 Epoch [1901/2000], loss: 0.005284 Training finished. Final loss: 0.004974
Example 2: training a convnet on CIFAR10¶
Data loading and preparation¶
In [27]:
# Transform images of range [0, 1] into tensors of normalized range [-1, 1]
transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
# Load training set
trainset = torchvision.datasets.CIFAR10(
root="./data", train=True, download=True, transform=transform
)
# Get an iterable from training set
trainloader = torch.utils.data.DataLoader(
trainset, batch_size=4, shuffle=True, num_workers=2
)
testset = torchvision.datasets.CIFAR10(
root="./data", train=False, download=True, transform=transform
)
testloader = torch.utils.data.DataLoader(
testset, batch_size=4, shuffle=False, num_workers=2
)
Files already downloaded and verified Files already downloaded and verified
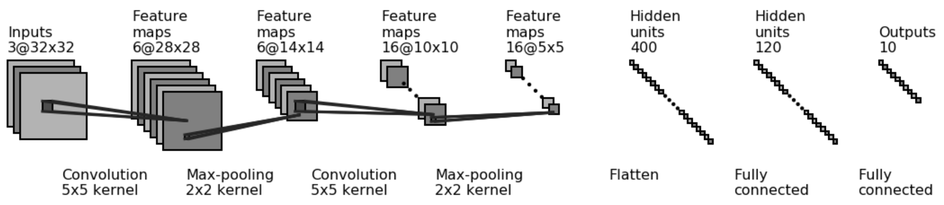
Expected network architecture¶
In [28]:
# Define a CNN that takes (3, 32, 32) tensors as input (channel-first)
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(in_channels=3, out_channels=6, kernel_size=5)
self.pool = nn.MaxPool2d(kernel_size=2, stride=2)
self.conv2 = nn.Conv2d(in_channels=6, out_channels=16, kernel_size=5)
# Convolution output is 16 5x5 feature maps, flattened as a 400 elements vectors
self.fc1 = nn.Linear(in_features=16 * 5 * 5, out_features=120)
self.fc2 = nn.Linear(in_features=120, out_features=10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = self.fc2(x)
return x
In [29]:
cnn_model = Net()
print(cnn_model)
Net( (conv1): Conv2d(3, 6, kernel_size=(5, 5), stride=(1, 1)) (pool): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) (conv2): Conv2d(6, 16, kernel_size=(5, 5), stride=(1, 1)) (fc1): Linear(in_features=400, out_features=120, bias=True) (fc2): Linear(in_features=120, out_features=10, bias=True) )
Model training¶
In [30]:
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(cnn_model.parameters(), lr=0.001, momentum=0.9)
num_epochs = 2
# Loop over the dataset multiple times
for epoch in range(num_epochs):
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
# Get the inputs; data is a list of [inputs, labels]
# inputs is a 4D tensor of shape (batch size, channels, rows, cols)
# labels is a 1D tensor of shape (batch size,)
inputs, labels = data
# Reset the parameter gradients
optimizer.zero_grad()
# Forward pass
outputs = cnn_model(inputs)
# Loos computation
loss = criterion(outputs, labels)
# Backward pass
loss.backward()
# GD step
optimizer.step()
# Print statistics
running_loss += loss.item()
if i % 2000 == 1999: # print every 2000 mini-batches
print(
f"Epoch [{epoch+1}/{num_epochs}], batch {i+1:5}, loss: {running_loss / 2000:.6f}"
)
running_loss = 0.0
print(f"Training finished")
Epoch [1/2], batch 2000, loss: 2.108662 Epoch [1/2], batch 4000, loss: 1.737864 Epoch [1/2], batch 6000, loss: 1.592003 Epoch [1/2], batch 8000, loss: 1.507958 Epoch [1/2], batch 10000, loss: 1.445331 Epoch [1/2], batch 12000, loss: 1.393309 Epoch [2/2], batch 2000, loss: 1.327055 Epoch [2/2], batch 4000, loss: 1.302520 Epoch [2/2], batch 6000, loss: 1.286105 Epoch [2/2], batch 8000, loss: 1.265079 Epoch [2/2], batch 10000, loss: 1.240521 Epoch [2/2], batch 12000, loss: 1.270833 Training finished
Model evaluation¶
In [31]:
correct = 0
total = 0
with torch.no_grad():
for data in testloader:
# Load inputs and labels
images, labels = data
# Compute model predictions for batch. Shape is (batch size, number of classes) so(4, 10) here
outputs = cnn_model(images)
# Get the indexes of maximum values along the second axis
# This gives us the predicted classes (those with the highest prediction value)
_, predicted = torch.max(outputs.data, dim=1)
total += labels.size(0)
# Add the number of correct predictions for the batch to the total count
correct += (predicted == labels).sum().item()
print(f"Test acccuracy: {(100 * correct / total)}%")
Test acccuracy: 56.16%