Classify "Quick, draw!" drawings¶
How to implement an image classifier in PyTorch?
- Data pipeline - DataSet, Data Augmentation
- Implementation - PyTorch Modules
- ConvNets - Convolution, learn Kernels, Pooling
"Can a neural network learn to recognize doodling?" - quickdraw.withgoogle.com

Import libraries¶
import torch
print("Torch version:", torch.__version__)
import torchvision
print("Torchvision version:", torchvision.__version__)
import numpy as np
print("Numpy version:", np.__version__)
import matplotlib
print("Matplotlib version:", matplotlib.__version__)
import PIL
print("PIL version:", PIL.__version__)
import IPython
print("IPython version:", IPython.__version__)
# Setup Matplotlib
%matplotlib inline
#%config InlineBackend.figure_format = 'retina' # If you have a retina screen
import matplotlib.pyplot as plt
A QuickDraw DataSet¶
More about PyTorch - Data Loading and Processing Tutorial by Sasank Chilamkurthy
- How to encapsulate a data set? - DataSet
- How to perform Data augmentation? - Transformation pipelines
Download Numpy bitmap files .npy - npy files from Google Cloud / GitHub repository
Possible classes: Airplanes - Cars - Cats - Ships

# If your are on mybinder.org, you can use this code to download the data
!mkdir -p data
!wget "https://storage.googleapis.com/quickdraw_dataset/full/numpy_bitmap/aircraft%20carrier.npy" -O "data/airplane.npy" -q --show-progress
!wget "https://storage.googleapis.com/quickdraw_dataset/full/numpy_bitmap/car.npy" -O "data/car.npy" -q --show-progress
!wget "https://storage.googleapis.com/quickdraw_dataset/full/numpy_bitmap/cat.npy" -O "data/cat.npy" -q --show-progress
!wget "https://storage.googleapis.com/quickdraw_dataset/full/numpy_bitmap/cruise%20ship.npy" -O "data/cruise ship.npy" -q --show-progress
import os
# Collect files
npy_files = [
os.path.join('data', 'airplane.npy'),
os.path.join('data', 'car.npy'),
os.path.join('data', 'cat.npy'),
os.path.join('data', 'cruise ship.npy'),
]
classes = ['plane', 'car', 'cat', 'ship']
from PIL import Image
# Create a class for our data set
class QuickDraw(torch.utils.data.Dataset):
def __init__(self, npy_files, transform=None):
# Open .npy files
self.X_list = [np.load(f, mmap_mode='r') for f in npy_files]
self.lengths = [len(X) for X in self.X_list]
# Transformation pipeline
self.transform = transform
def __len__(self):
return sum(self.lengths)
def get_pixels(self, idx):
for label, (X, l) in enumerate(zip(self.X_list, self.lengths)):
if idx < l:
return X[idx], label
idx -= l
def __getitem__(self, idx):
# Get image
img, label = self.get_pixels(idx)
pil_img = Image.fromarray(255 - img.reshape(28, 28)) # White background
# Transform image
processed_img = self.transform(pil_img) if self.transform else pil_img
return processed_img, label
# Create the data set
dataset = QuickDraw(npy_files)
print('Size:', len(dataset))
dataset[0][0]
from torchvision import transforms
# Data augmentation
t = transforms.Compose([
transforms.RandomAffine(degrees=25, translate=(0.1, 0.1), shear=5, fillcolor=255),
transforms.RandomHorizontalFlip()
])
dataset = QuickDraw(npy_files, t)
print('Size:', len(dataset))
# Get first image
dataset[0][0]
Data loaders¶
The next steps of the Data Pipeline in PyTorch
- Data Samplers - Train, Validation samplers
- Data Loaders - Combine DataSet, DataSampler
from torch.utils.data.sampler import SubsetRandomSampler
# Define train/validation sets
idx = np.arange(len(dataset)) # idx: 0 .. (n_images - 1)
np.random.shuffle(idx) # shuffle
# Create train/validation samplers
valid_size = 500
train_sampler = SubsetRandomSampler(idx[:-valid_size])
valid_sampler = SubsetRandomSampler(idx[-valid_size:])
print('Train set:', len(train_sampler))
print('Validation set:', len(valid_sampler))
from torch.utils.data import DataLoader
# Data augmentation for the "training" set
train_t = transforms.Compose([
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize((0.829,), (0.326,)) # Computed on the train set
])
valid_t = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.829,), (0.326,))
])
# Create DataSets
train_set = QuickDraw(npy_files, train_t)
valid_set = QuickDraw(npy_files, valid_t)
# Create DataLoaders
train_loader = DataLoader(train_set, batch_size=64, sampler=train_sampler)
valid_loader = DataLoader(valid_set, batch_size=64, sampler=valid_sampler)
# Plot sample images
images, labels = next(iter(train_loader))
print('Labels:', labels)
grid = torchvision.utils.make_grid(images, normalize=True)
plt.imshow(grid.numpy().transpose((1, 2, 0)))
plt.show()
Fully-connected Network¶
What are the different ways to define a Network in PyTorch?
- Sequential Class - Add layers from nn module
- Create a NN Module - Subclass of torch.nn.Module or others, ex. torch.nn.Sequential
PyTorch nn.Module - link to the documentation
torch.nn.Module- Base class for all neural network modules. Your models should also subclass this class. Modules can also contain other Modules, allowing to nest them in a tree structure. You can assign the submodules as regular attributes: Submodules assigned in this way will be registered, and will have their parameters converted too when you call .cuda(), etc.
# Create a FullyConnected "Sequential" Module
class FullyConnected(torch.nn.Sequential):
def __init__(self, n_in, n_out, h_units=[]):
# Initialize module
super().__init__()
# Save network parameters
self.n_inputs = n_in
self.n_outputs = n_out
self.h_units = h_units
# Add hidden layers
n_hidden = len(h_units)
for i in range(n_hidden):
# Input/output sizes
hidden_in = n_in if i == 0 else h_units[i-1]
hidden_out = h_units[i]
# Add layer and activation
self.add_module('hidden_{}'.format(i+1), torch.nn.Linear(hidden_in, hidden_out))
self.add_module('relu_{}'.format(i+1), torch.nn.ReLU())
# Add output layer
output_in = n_in if n_hidden == 0 else hidden_out
self.add_module('output', torch.nn.Linear(output_in, n_out))
def forward(self, img):
flat_img = img.view(-1, self.n_inputs)
return super().forward(flat_img)
# Test
model = FullyConnected(28*28, len(classes))
model
Task - How to access Model Parameters?
- Plot weights from the first layer
# Visualize 1st layer of a FC network
def plot_weights(weights_fc1, axis):
# Shape of weights matrix
n_out, n_in = weights_fc1.shape
# Create a grid
n_cells = min(16, n_out)
grid = torchvision.utils.make_grid(
weights_fc1[:n_cells].view(n_cells, 1, 28, 28),
nrow=4, normalize=True
)
# Plot it
axis.imshow(grid.numpy().transpose((1, 2, 0)),)
# TODO - Plot weights from "model" 1st layer
Train the Model¶
Tasks - What is a good Network Architecture?
- 2-layer FC network - Best accuracy?
- Deeper network - Can you improve results?
from collections import defaultdict
# Create model
model = FullyConnected(28*28, len(classes))
# Criterion and optimizer for "training"
criterion = torch.nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(model.parameters(), lr=0.01, weight_decay=1)
# Backprop step
def compute_loss(output, target):
y_tensor = torch.LongTensor(target)
y_variable = torch.autograd.Variable(y_tensor)
return criterion(output, y_variable)
def backpropagation(output, target):
optimizer.zero_grad() # Clear the gradients
loss = compute_loss(output, target) # Compute loss
loss.backward() # Backpropagation
optimizer.step() # Let the optimizer adjust our model
return loss.data
# Helper function
def get_accuracy(output, y):
predictions = torch.argmax(output, dim=1) # Max activation
is_correct = np.equal(predictions, y)
return is_correct.numpy().mean()
# Create a figure to visualize the results
fig, (ax1, ax2, ax3) = plt.subplots(nrows=1, ncols=3, figsize=(12, 3))
try:
# Collect loss / accuracy values
stats = defaultdict(list)
t = 0 # Number of samples seen
print_step = 200 # Refresh rate
for epoch in range(1, 10**5):
# Train by small batches of data
for batch, (batch_X, batch_y) in enumerate(train_loader, 1):
# Forward pass & backpropagation
output = model(batch_X)
loss = backpropagation(output, batch_y)
# Log "train" stats
stats['train_loss'].append(loss)
stats['train_acc'].append(get_accuracy(output, batch_y))
stats['train_t'].append(t)
if t%print_step == 0:
# Log "validation" stats
loss_vals, acc_vals = [], []
for X, y in valid_loader:
output = model(X)
loss_vals.append(compute_loss(output, y).data)
acc_vals.append(get_accuracy(output, y))
stats['val_loss'].append(np.mean(loss_vals))
stats['val_acc'].append(np.mean(acc_vals))
stats['val_t'].append(t)
# Plot what the network learned
ax1.cla()
ax1.set_title('Epoch {}, batch {:,}'.format(epoch, batch))
plot_weights(model[0].weight.data, ax1)
ax2.cla()
ax2.set_title('Loss, val: {:.3f}'.format(np.mean(stats['val_loss'][-10:])))
ax2.plot(stats['train_t'], stats['train_loss'], label='train')
ax2.plot(stats['val_t'], stats['val_loss'], label='valid')
ax2.legend()
ax3.cla()
ax3.set_title('Accuracy, val: {:.3f}'.format(np.mean(stats['val_acc'][-10:])))
ax3.plot(stats['train_t'], stats['train_acc'], label='train')
ax3.plot(stats['val_t'], stats['val_acc'], label='valid')
ax3.set_ylim(0, 1)
ax3.legend()
# Jupyter trick
IPython.display.clear_output(wait=True)
IPython.display.display(fig)
# Update t
t += train_loader.batch_size
except KeyboardInterrupt:
# Clear output
IPython.display.clear_output()
Convolutional Network¶
"Make some assumptions about the inputs to make learning more efficient" - Andrej Karpathy Lecture
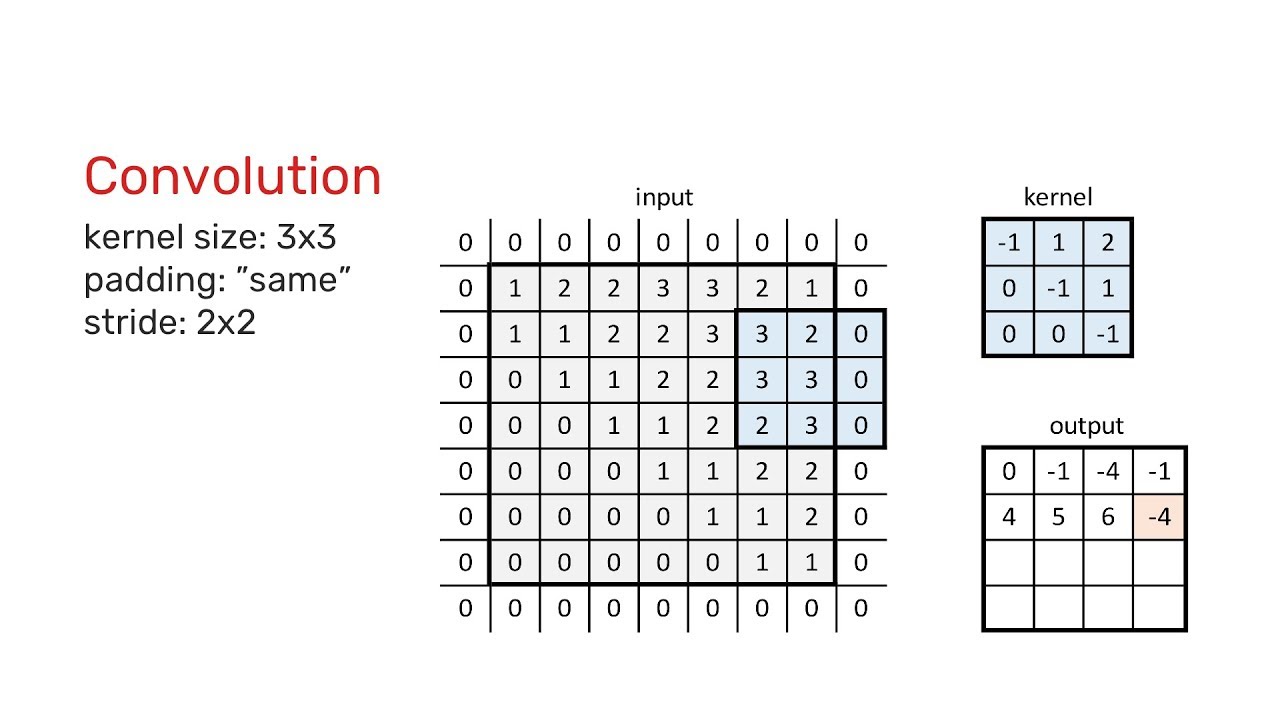
Convolutional Layers Parameters
- Kernel Size - Size of our "Feature Detectors"
- Output depth - Number of kernels
- Stride - How they move
- Padding - Add "borders" to the inputs
Pooling Parameters
- Pooling function - Maximum, Average
- Size and Stride - Downsampling ex. size=2 and stride=2
Implementation - Inspired by AlexNet PyTorch Code
from collections import namedtuple
# Create a Pooling Named Tuple
PoolParams = namedtuple('PoolParams', ['size', 'stride'])
sample_poolparams = PoolParams(size=2, stride=2)
# Create a ConvParams Named Tuple
ConvParams = namedtuple('ConvParams', ['size', 'n_kernels', 'stride', 'pooling'])
sample_convparams = ConvParams(size=16, n_kernels=5, stride=2, pooling=None)
# Create an InputShape Named Tuple
InputShape = namedtuple('InputShape', ['channels', 'height', 'width'])
images_shape = InputShape(channels=1, height=28, width=28)
# Create a ConvNet Module
class ConvNet(torch.nn.Module):
def __init__(self, layers_params, input_shape):
# Initialize module
super().__init__()
# "Feature extraction" part
self.features = torch.nn.Sequential()
for layer_no, (size, n_kernels, stride, pooling) in enumerate(layers_params, 1):
# Input depth
depth_in = input_shape.channels if layer_no == 1 else layers_params[layer_no-2].n_kernels
# Convolutional Layer
self.features.add_module(
'conv2d_{}'.format(layer_no),
torch.nn.Conv2d(depth_in, n_kernels, size, stride)
)
self.features.add_module('relu_{}'.format(layer_no), torch.nn.ReLU())
# Max-pooling layer
if pooling is not None:
self.features.add_module('maxpool_{}'.format(layer_no), torch.nn.MaxPool2d(pooling.size, pooling.stride))
# Compute the number of features extracted
sample_input = torch.zeros(1, input_shape.channels, input_shape.height, input_shape.width)
_, depth_out, height_out, width_out = self.features(sample_input).shape
self.n_features = depth_out*height_out*width_out
# "Classifier" part
self.classifier = torch.nn.Sequential(
torch.nn.Linear(self.n_features, 10)
)
def forward(self, img):
# Extract features
img_features = self.features(img)
flat_features = img_features.view(-1, self.n_features)
# Classify image
return self.classifier(flat_features)
# Create toy model
model = ConvNet([
ConvParams(size=5, n_kernels=16, stride=2, pooling=PoolParams(size=2, stride=2)),
ConvParams(size=3, n_kernels=32, stride=1, pooling=PoolParams(size=2, stride=2)),
], images_shape)
model
# Try forward pass
print('Sample input:', images.shape)
print('Sample output:', model(images).shape)
How to access Model Parameters?
# Visualize kernels from the 1st Convolutional Layer
def plot_kernels(model, axis):
# Weights
kernel_weights = model.features.conv2d_1.weight.data
n_kernels, in_depth, height, width = kernel_weights.shape
# Create a grid
n_cells = min(16, n_kernels)
grid = torchvision.utils.make_grid(
kernel_weights[:n_cells, 0].view(n_cells, in_depth, height, width),
nrow=4, normalize=True, padding=1
)
# Plot it
axis.imshow(grid.numpy().transpose((1, 2, 0)),)
fig = plt.figure(figsize=(3, 3))
plot_kernels(model, fig.gca())
Tasks - Convolutional Nets
- Train model - Adapt "training" code from above for ConvNets
- Model Architecture - Play with the different parameters, best accuracy?
# TODO - Train ConvNet here
Small challenges¶
- Print the number of parameters in each layer
- Pass a few images and print the outputs shapes
- Plot the "activation maps" for a sample input
Additional resources¶
Nice visualizations
- Deep Visualization Toolbox - Presentation on YouTube / GitHub repository
- Feature Visualization - distill.pub article
- The Building Blocks of Interpretability - distill.pub article
To go deeper
- ImageNet Classification with Deep Convolutional Neural Networks - Slides