 EE 046746 - Technion - Computer Vision
EE 046746 - Technion - Computer Vision Agenda
AgendaHomographic usage examples:
%%html
<iframe src="http://www.in2white.com/" width="700" height="600"></iframe>
# imports for the tutorial
import numpy as np,sys
import matplotlib.pyplot as plt
from PIL import Image
import cv2
from scipy import signal
%matplotlib inline
# plot images function
def plot_images(image_list, title_list, subplot_shape=(1,1), axis='off', fontsize=30, figsize=(4,4), cmap=['gray']):
plt.figure(figsize=figsize)
for ii, im in enumerate(image_list):
c_title = title_list[ii]
if len(cmap) > 1:
c_cmap = cmap[ii]
else:
c_cmap = cmap[0]
plt.subplot(subplot_shape[0], subplot_shape[1],ii+1)
plt.imshow(im, cmap=c_cmap)
plt.title(c_title, fontsize=fontsize)
plt.axis(axis)
 Matching Local Features
Matching Local Features

Typical feature matching results¶
- Some matches are correct
- Some matches are incorrect

- Solution: search for a set of geometrically consistent matches
 Parametric Transformations
Parametric Transformations
Image Alignment¶
Given a set of matches, what parametric model describes a geometrically consistent transformation?



im = cv2.imread('./assets/tut_8_exm.jpg')
im = cv2.cvtColor(im,cv2.COLOR_BGR2RGB)
rows,cols,d = im.shape
print(im.shape)
# Translation:
tx,ty = [10,20]
h_T = np.float32([[1,0,tx],[0,1,ty],[0,0,1]])
# Rotation
theta = np.deg2rad(20)
h_R = np.float32([[np.cos(theta),-np.sin(theta),0],[np.sin(theta),np.cos(theta),0],[0,0,1]])
# Affine
h_AFF = np.array([[ 1.26666667,-0.5,-60],[ -0.33333333,1,66.66666667],[0,0,1]])
H = [h_T,h_R,h_AFF]
img = [im]
for h in H:
img.append(cv2.warpPerspective(im, h,(cols,rows)))
Titles = ['Original','Translation','Rotation','Affine']
# Perspective
pts1 = np.float32([[100,77],[320,105],[100,150],[385,170]])
pts2 = np.float32([[0,0],[300,0],[0,100],[300,50]])
M = cv2.getPerspectiveTransform(pts1,pts2)
im_perspective = cv2.warpPerspective(im,M,(400,300))
# Cylindrical (non linear)
def cylindricalWarp(img, K):
"""This function returns the cylindrical warp for a given image and intrinsics matrix K"""
h_,w_ = img.shape[:2]
# pixel coordinates
y_i, x_i = np.indices((h_,w_))
X = np.stack([x_i,y_i,np.ones_like(x_i)],axis=-1).reshape(h_*w_,3) # to homog
Kinv = np.linalg.inv(K)
X = Kinv.dot(X.T).T # normalized coords
# calculate cylindrical coords (sin\theta, h, cos\theta)
A = np.stack([np.sin(X[:,0]),X[:,1],np.cos(X[:,0])],axis=-1).reshape(w_*h_,3)
B = K.dot(A.T).T # project back to image-pixels plane
# back from homog coords
B = B[:,:-1] / B[:,[-1]]
# make sure warp coords only within image bounds
B[(B[:,0] < 0) | (B[:,0] >= w_) | (B[:,1] < 0) | (B[:,1] >= h_)] = -1
B = B.reshape(h_,w_,-1)
img_rgba = cv2.cvtColor(img,cv2.COLOR_RGB2RGBA) #BGR2BGRA for transparent borders...
# warp the image according to cylindrical coords
return cv2.remap(img_rgba, B[:,:,0].astype(np.float32), B[:,:,1].astype(np.float32),
cv2.INTER_AREA, borderMode=cv2.BORDER_TRANSPARENT)
# Camera parameters:
K = np.array([[200,0,cols/2],[0,400,rows/2],[0,0,1]]) # mock intrinsics
img_cyl = cylindricalWarp(im, K)
(362, 484, 3)
plot_images(img,Titles,(1,4),figsize=(16,4),fontsize=20)
plt.figure(figsize=(12,4))
plt.subplot(131)
plt.imshow(im),plt.title('Perspective input',fontsize=20)
plt.plot(pts1[:,0],pts1[:,1],'m*')
plt.axis('off')
plt.subplot(132),plt.imshow(im_perspective),plt.title('Perspective',fontsize=20)
plt.plot(pts2[:,0],pts2[:,1],'m*')
plt.axis('off')
plt.subplot(133),plt.imshow(img_cyl)
plt.title('Cylindrical',fontsize=20)
_ = plt.axis('off')


Code source - OpenCV
Cylinder code source - More Than Technical
 Basic 2D Transformations
Basic 2D Transformations

Basic 2D Transformations - Translation¶
$$ \begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & 0 & t_x\\ 0 & 1 & t_y \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} = \begin{bmatrix} x+t_x \\ y+t_y \\ 1 \end{bmatrix}$$
# Translation:
tx,ty = [10,20]
h_T = np.float32([[1,0,tx],[0,1,ty],[0,0,1]])
im_T = cv2.warpPerspective(im, h_T,(cols,rows))
plot_images([img[0],img[1]],[Titles[0],Titles[1]],(1,2),figsize=(12,12),fontsize=20)

Basic 2D Transforation - Rotation¶
$$ \begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} cos(\theta) & -sin(\theta) & 0\\sin(\theta) & cos(\theta) & 0 \\0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} $$
- Around which point do we rotate the image?
# Rotation:
theta = np.deg2rad(20)
h_R = np.float32([[np.cos(theta),-np.sin(theta),0],[np.sin(theta),np.cos(theta),0],[0,0,1]])
im_R = cv2.warpPerspective(im, h_R,(cols,rows))
plot_images([img[0],img[2]],[Titles[0],Titles[2]],(1,2),figsize=(12,12),fontsize=20)

Basic 2D Transformations – Translation and Rotation (2D rigid body motion)¶
$$ \begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} \cos(\theta) & -\sin(\theta) & t_x\\ \sin(\theta) & \cos(\theta) & t_y \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} $$
- Euclidean distances are preserved
- Combination of rotation and translation, which one applied first?
H = h_T @ h_R
im_temp = cv2.warpPerspective(im, H, (cols, rows))
plot_images([img[0], im_temp], [Titles[0], 'Rigid'], (1,2), figsize=(12,12), fontsize=20)

Basic 2D Transformations – Scale¶
$$ \begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} s & 0 & 0\\ 0 & s & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} $$
# scaling
s = 1.5
h_s = np.array([[s, 0, 0], [0, s, 0], [0, 0, 1]],np.float32)
im_s = cv2.warpPerspective(im, h_s, (cols, rows))
plot_images([img[0], im_s],[Titles[0],'Scale'], (1, 2), figsize=(12,12), fontsize=20)

Basic 2D Transformations – Similarity¶
Similarity transform (4 DoF) = translation + rotation + scale
h_sim = h_s @ h_T @ h_R
im_sim = cv2.warpPerspective(im, h_sim, (cols, rows))
plot_images([img[0], im_sim], [Titles[0], 'Similarity'], (1,2), figsize=(12,12), fontsize=20)

Basic 2D Transformation - Aspect Ratio¶
$$ \begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix}= \begin{bmatrix} a & 0 & 0\\ 0 & \frac{1}{a} & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} $$
# Aspect Ratio
a = 1 / 2
h_ar = np.array([[a, 0, 0], [0, 1 / a, 0], [0, 0, 1]], np.float32)
im_ar = cv2.warpPerspective(im, h_ar, (cols,rows))
plot_images([img[0], im_ar], [Titles[0], 'Aspect Ratio'], (1,2), figsize=(12,12), fontsize=20)

Basic 2D Transformations – Shear¶
$$ \begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & a & 0\\ b & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} $$
# shear
a,b = (0.5, 0.1)
h_sh = np.array([[1, a, 0],[b, 1, 0], [0, 0, 1]], np.float32)
im_sh = cv2.warpPerspective(im, h_sh, (cols, rows))
plot_images([img[0], im_sh], [Titles[0], 'Shear'], (1,2), figsize=(12,12), fontsize=20)

Basic 2D Transformations – Affine¶
Similarity transform (6 DoF) = translation + rotation + scale + aspect ratio +shear
# affine transform
h_aff = h_ar @ h_sh @ h_s @ h_T @ h_R
im_aff = cv2.warpPerspective(im, h_aff, (cols * 4, rows * 4))
plot_images([img[0], im_aff], [Titles[0], 'Affine'], (1,2), figsize=(12,12), fontsize=20)

- Simple fitting procedure (linear least squares)
- Approximates viewpoint change for roughly planar objects and roughly orthographic camera
- Can be used to initialize fitting for more complex models

Basic 2D Transformations – Projective - a.k.a - Homographic¶
$$ \begin{bmatrix} u \\ v \\ w \end{bmatrix} = \begin{bmatrix} h_1 & h_2 & h_3\\ h_4 & h_5 & h_6 \\ \color{red}{\text{h}}_\color{red}{\text{7}} & \color{red} {\text{h}}_\color{red}{\text{8}} & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} $$$$x' = u/w$$$$y' = v/w$$
Non-linear!
# Perspective
pts1 = np.float32([[100,77],[320,105],[100,150],[385,170]])
pts2 = np.float32([[0,0],[300,0],[0,100],[300,50]])
h_per = cv2.getPerspectiveTransform(pts1,pts2)
im_perspective = cv2.warpPerspective(im,h_per,(400,300))
plot_images([img[0], im_perspective], [Titles[0], 'Projective'], (1, 2), figsize=(12,12), fontsize=20)

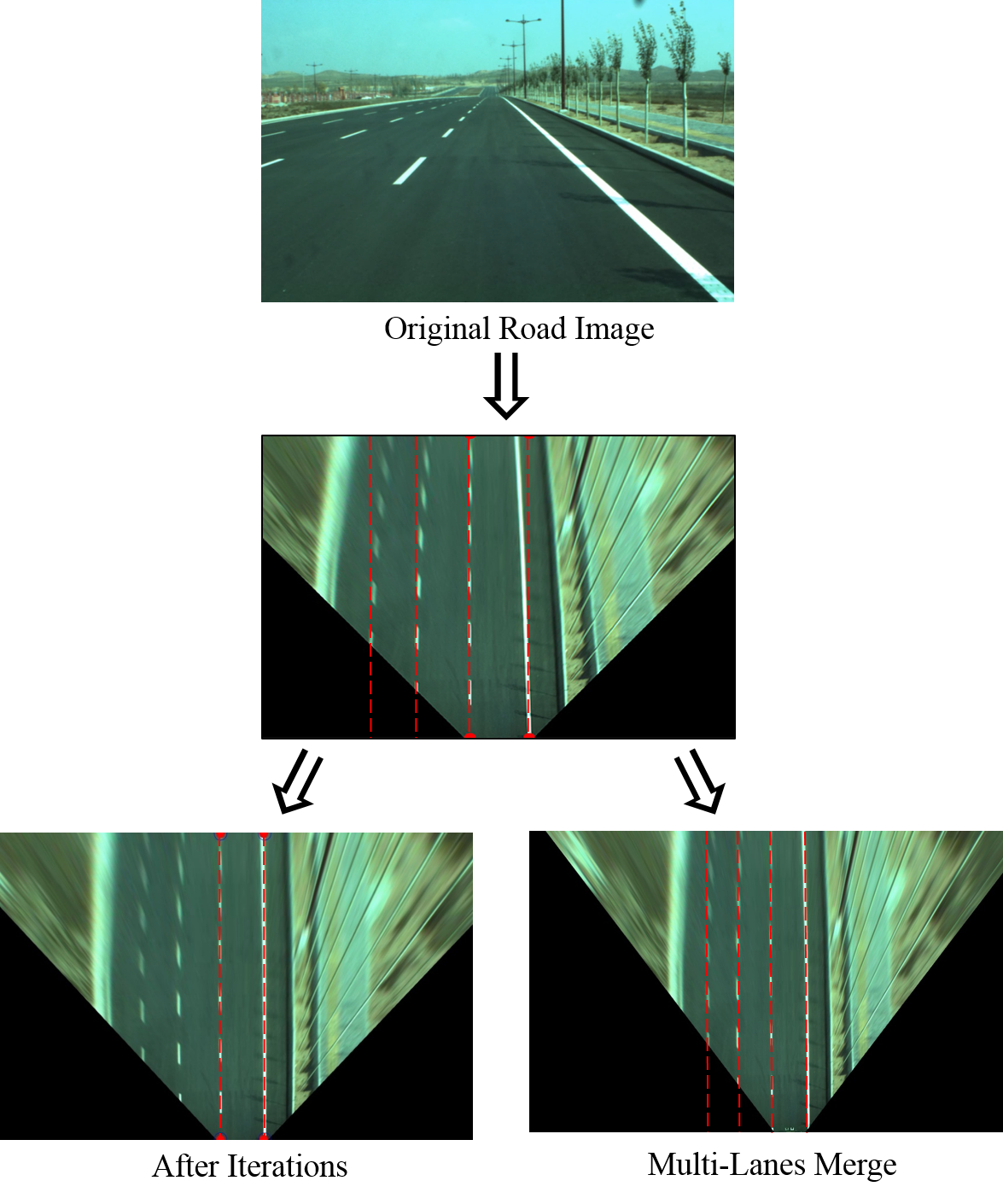
When do we get Homography?¶
Homography maps between:
- points on a plane in the world and their positions in an image
- points in two different images of the same plane
- two images of a 3D object where the camera has rotated but not translated
For far away objects:
- works fine for small viewpoint changes
 Computing Parametric Transformations
Computing Parametric TransformationsComputing Affine Transformation¶
- Assuming we know correspondences, how do we get transformation?
- Solve with Least-squares $||Ah-b||^2$ $$h = (A^TA)^{-1}A^Tb$$
In Python:
A_inv = pinv(A)
h = np.linalg.pinv(A)@b
- How many matches (correspondence pairs) do we need to solve?
- Once we have solved for the parameters, how do we compute the coordinates of the cooresponding point for any pixel $(x_{new},y_{new})$?
Computing Projective Transformation¶
- Recall working with homogenous coordinates
- We get the following non-linear equation:
- We can re-arrange the equation
- We want to find a vector $h$ satisfying
where A is full rank. We are obviously not interested in the trivial solution $h=0$ hence we add the constraint $$||h||=1$$
- Thus, we get the homogeneous Least square equation:
Compute Projective transformation using SVD: $$arg \min_h{||Ah||_2^2} \text{, } s.t ||h||_2^2=1 $$
- Let decompose $A$ using SVD: $ A = UDV^T $, where $U$ and $V$ are orthonomal matrix, and $D$ is a diagonal matrix.
- Need a reminder on SVD? Click Here
- From orthonormality of $U$ and $V$:
Hence, we get the following minimization problem:
$$ arg \min_h||DV^Th|| \text{ s.t. } ||V^Th||=1 $$- Subsitute $y=V^Th$:
- $D$ is a diagonal matrix with decreasing values. Then, it is clear that $y=[0,0,\dots,1]^T$.
- Therefore, choosing $h$ to be the last column in $V$ will minimize the equation.
In Python:
(U,D,Vh) = np.linalg.svd(A,False)
h = Vh.T[:,-1]
Some more options to find $h$:¶
Lagrange multipliers - Least–squares Solution of Homogeneous Equations
Using EVD (eigenvalue decomposition) on $A^TA$.
If we know our transformation is nearly Affine we can get an approximate solution using linear least squares
 RANSAC
RANSACThe RANSAC algorithm is extremly simple, but it often
- Does not produce correct model with user-defined probability
- Outputs an inaccurate model
- Does not handle degeneracies
- Can be sped up (by orders of magnitude)
- Does not gurantee minimum running time
- Needs information about scale of the noise
- Does not handle multiple models efficiently
Many improved algorithms:
- PROSAC
- Key idea is to use to assume that the similarity measure predicts correctness of a match
- Randomized RANSAC
- Each step take a random subset of the query points and perform RANSAC
- KALMANSAC
- and more...
- Estimating homogrpahy with RANSAC in OpenCV:
cv2.findHomography(src_pts, dst_pts, cv2.RANSAC)
Cool application 1: Planting images into other images¶

- result achieved with inverse warping and an affine transform
Cool application 3: Looking into the past¶

- result achieved with inverse warping and a homography
- Image Source from Flickr
 Panorama
Panorama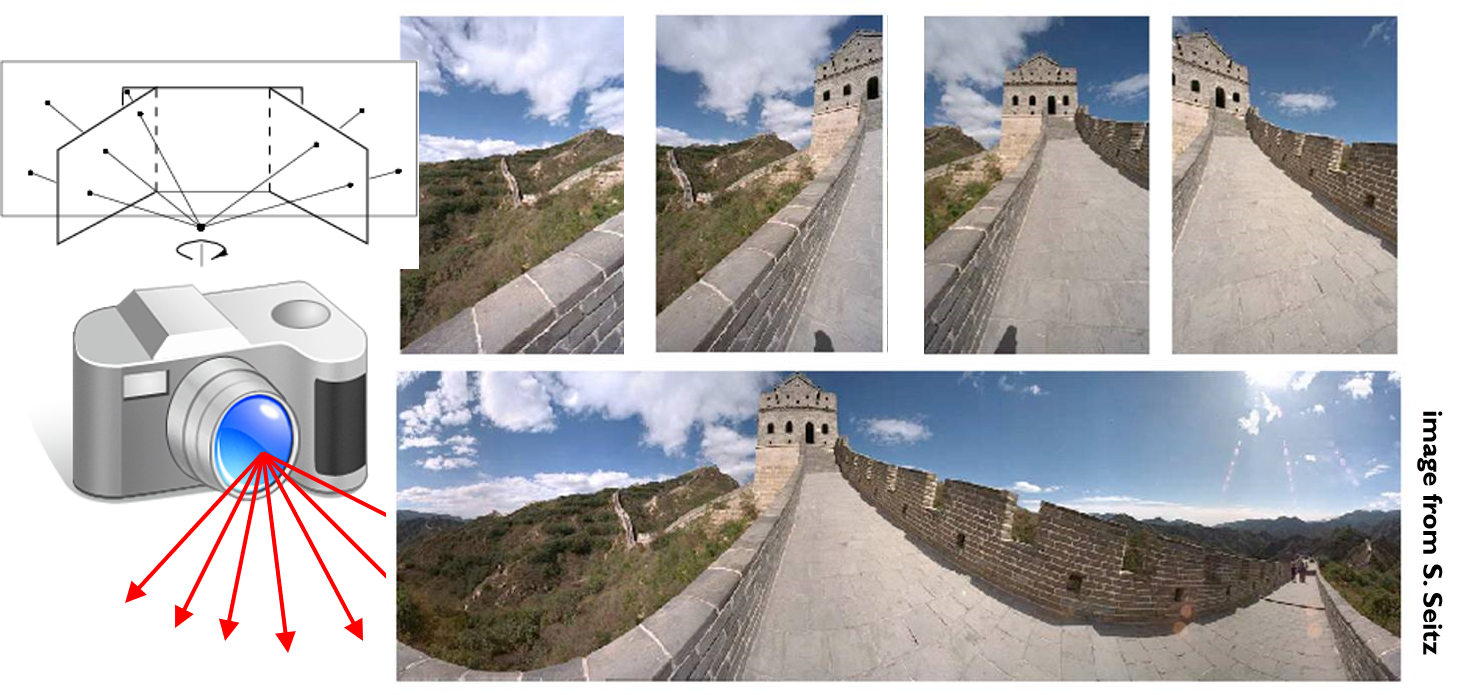
Obtain a wider angle view by combining multiple images



 Warp - What we need to solve?
Warp - What we need to solve?
- Given source and target images, and the transformation between them, how do we align them?
- Send each pixel $x$ in image1 to its corresponding location $x’$ in image 2

Forward Warping¶
What if pixel lands “between” two pixels?
Answer: add “contribution” to several pixels and normalize (splatting)

- Limitation: Holes (some pixels are never visited)

Inverse Warping¶
For each pixel x’ in image 2 find its origin x in image 1
Problem: What if pixel comes from “between” two pixels?

- Answer: interpolate color value from neighbors

Bilinear Interpolation¶
Sampling at $f(x,y)$:
 $$ f(x,y) = (1-a)(1-b) f[i,j]\\ + a(1-b) f[i+1,j]\\ + ab f[i+1,j+1]\\ +(1-a)b f[i,j+1]\\ $$
$$ f(x,y) = (1-a)(1-b) f[i,j]\\ + a(1-b) f[i+1,j]\\ + ab f[i+1,j+1]\\ +(1-a)b f[i,j+1]\\ $$Python:
interp2d()- https://docs.scipy.org/doc/scipy/reference/generated/scipy.interpolate.interp2d.html- Inverse warping in OpenCV:
cv2.warpPerspective(im,*,*,cv2.WARP_INVERSE_MAP)
import numpy as np
from scipy import interpolate
import matplotlib.pyplot as plt
x = np.arange(-5.01, 5.01, 0.25)
y = np.arange(-5.01, 5.01, 0.25)
xx, yy = np.meshgrid(x, y)
z = np.sin(xx**2+yy**2)
## Cubic
f = interpolate.interp2d(x, y, z, kind='cubic')
xnew = np.arange(-5.01, 5.01, 1e-2)
ynew = np.arange(-5.01, 5.01, 1e-2)
znew = f(xnew, ynew)
plt.figure()
plt.subplot(121)
plt.imshow(z,vmin=-1,vmax=1)
plt.subplot(122)
plt.imshow(znew,vmin=-1,vmax=1)
plt.show()
plt.figure()
plt.plot(x, z[0, :], 'ro-', xnew, znew[0, :], 'b-')
plt.show()
##linear
f = interpolate.interp2d(x, y, z, kind='linear')
xnew = np.arange(-5.01, 5.01, 1e-2)
ynew = np.arange(-5.01, 5.01, 1e-2)
znew = f(xnew, ynew)
plt.figure()
plt.subplot(121)
plt.imshow(z,vmin=-1,vmax=1)
plt.subplot(122)
plt.imshow(znew,vmin=-1,vmax=1)
plt.show()
plt.figure()
plt.plot(x, z[0, :], 'ro-', xnew, znew[0, :], 'b-')
plt.show()




 Image Blending
Image Blending

- Alpha blending
- Pyramid blending


Pyramid Blending:¶
- Build a Gaussian pyramid for each image
- Build the Laplacian pyramid for each image
- Decide/find the blending border (in the example: left half belongs to image 1, and right half to image 2 -> the blending border is
cols/2)- Split by index, or
- Split using a 2 masks (can be weighted masks)
- Constract a new mixed pyramid - mix each level seperatly acording to (3)
- Reconstract a blend image from the mixed pyramid
def create_pyrs(A,B):
# generate Gaussian pyramid for A
G = A.copy()
gpA = [G]
for i in range(6):
G = cv2.pyrDown(G)
gpA.append(G)
# generate Gaussian pyramid for B
G = B.copy()
gpB = [G]
for i in range(6):
G = cv2.pyrDown(G)
gpB.append(G)
# generate Laplacian Pyramid for A
lpA = [gpA[5]]
for i in range(5,0,-1):
GE = cv2.pyrUp(gpA[i])
L = cv2.subtract(gpA[i-1],GE)
lpA.append(L)
# generate Laplacian Pyramid for B
lpB = [gpB[5]]
for i in range(5,0,-1):
GE = cv2.pyrUp(gpB[i])
L = cv2.subtract(gpB[i-1],GE)
lpB.append(L)
return lpA,lpB
def blend_images(A,B):
lpA,lpB = create_pyrs(A,B)
# Now add left and right halves of images in each level
LS = []
for la,lb in zip(lpA,lpB):
rows,cols,dpt = la.shape
ls = np.hstack((la[:,0:int(cols/2)], lb[:,int(cols/2):])) #mixing can also be done with a mask
LS.append(ls)
# now reconstruct
ls_ = LS[0]
for i in range(1,6):
ls_ = cv2.pyrUp(ls_)
ls_ = cv2.add(ls_, LS[i])
# image with direct connecting each half
real = np.hstack((A[:,:int(cols/2)],B[:,int(cols/2):]))
return real, ls_
def switch_texture(A,B):
lpA,lpB = create_pyrs(A,B)
# Now add left and right halves of images in each level
LS = []
# for la,lb in zip(lpA,lpB):
# rows,cols,dpt = la.shape
# ls = np.hstack((la[:,0:int(cols/2)], lb[:,int(cols/2):])) #mixing can also be done with a mask
# LS.append(ls)
# now reconstruct
ls_ = lpA[0]
for i in range(1,6):
ls_ = cv2.pyrUp(ls_)
ls_ = cv2.add(ls_, lpB[i])
# image with direct connecting each half
real = np.hstack((A[:,:int(cols/2)],B[:,int(cols/2):]))
return real, ls_
def alpha_blend(A,B,MASK):
A = np.float32(A)
B = np.float32(B)
return np.uint8(A*MASK), np.uint8(A*MASK+B*(1-MASK))
A = cv2.imread('./assets/apple.jpg')
B = cv2.imread('./assets/orange.jpg')
real,ls_ = blend_images(A,B)
ls_ = cv2.cvtColor(ls_,cv2.COLOR_BGR2RGB)
real = cv2.cvtColor(real,cv2.COLOR_BGR2RGB)
plot_images([real,ls_],['Original','Pyramid Blend'],(1,2),figsize=(12,12),fontsize=20)

- Alpha blending example:
MASK = np.ones_like(A,np.float32)
rows,cols,dpt = MASK.shape
w=20
v_dec = np.linspace(1,0,2*w)
MASK[:,int(cols/2):]=0
MASK[:,(int(cols/2)-w):(int(cols/2)+w)]=np.tile(np.reshape(v_dec,[1,-1,1]),[rows,1,3])
real,ls_ = alpha_blend(A,B,MASK)
ls_ = cv2.cvtColor(ls_,cv2.COLOR_BGR2RGB)
real = cv2.cvtColor(real,cv2.COLOR_BGR2RGB)
plot_images([real,MASK,ls_],['Original','Mask','Alpha Blending'],(1,3),figsize=(18,12),fontsize=20)

- Stylize image using pyramids:
real,ls_ = switch_texture(A,B)
ls_ = cv2.cvtColor(ls_,cv2.COLOR_BGR2RGB)
real = cv2.cvtColor(real,cv2.COLOR_BGR2RGB)
plot_images([real,ls_],['Original','Texture'],(1,2),figsize=(12,12),fontsize=20)

 Blending Improvments
Blending Improvments
- Many algorithms have different variations of combining alpha and pyramid blending (different masks for different frequencies)
- Find the boundaries using segmentation
 Panorama - Summary
Panorama - Summary
- Detect features
- Compute transformations between pairs of frames
- Can Refine transformations using RANSAC
- Warp all images onto a single coordinate system
- Find mixing borders (e.g. using segmentation)
- Blend
 Transformations in Deep Learning
Transformations in Deep Learning
- Can we incorporate transformations in the pipeline of a deep learning algorithm?
- Moreover, can we accelerate these transformations by performing them on a GPU?
- YES!
Kornia - Computer Vision Library for PyTorch¶
- Kornia is a differentiable computer vision library for PyTorch
- That means you can have gradients for the transformations!
- Inspired by OpenCV, this library is composed by a subset of packages containing operators that can be inserted within neural networks to train models to perform image transformations, epipolar geometry, depth estimation, and low-level image processing such as filtering and edge detection that operate directly on tensors.
- Check out
kornia.geometry- https://kornia.readthedocs.io/en/latest/geometry.html - Warp image using perspective transform

 Recommended Videos
Recommended Videos
 Warning!
Warning!
- These videos do not replace the lectures and tutorials.
- Please use these to get a better understanding of the material, and not as an alternative to the written material.
Video By Subject¶
- Homography
- Image geometry and planar homography - ENB339 lecture 9: Image geometry and planar homography
- Homography - Homography in computer vision explained
- Transformations - Lect. 5(1) - Linear and affine transformations
- Matching Local Features
- SIFT - CSCI 512 - Lecture 12-1 SIFT
- RANSAC (see Tutorial 2)
 Credits
Credits
EE 046746 Spring 2020 - Dahlia Urbach
Slides - Elad Osherov (Technion), Simon Lucey (CMU)
Multiple View Geometry in Computer Vision - Hartley and Zisserman - Section 2
Least–squares Solution of Homogeneous Equations - Center for Machine Perception - Tomas Svoboda
Computer vision: models, learning and inference , Simon J.D. Prince - Section 15.1
Computer Vision: Algorithms and Applications - Richard Szeliski - Sections 2,4,6, 9 (Free for Technion students via remote library)
Icons from Icon8.com - https://icons8.com